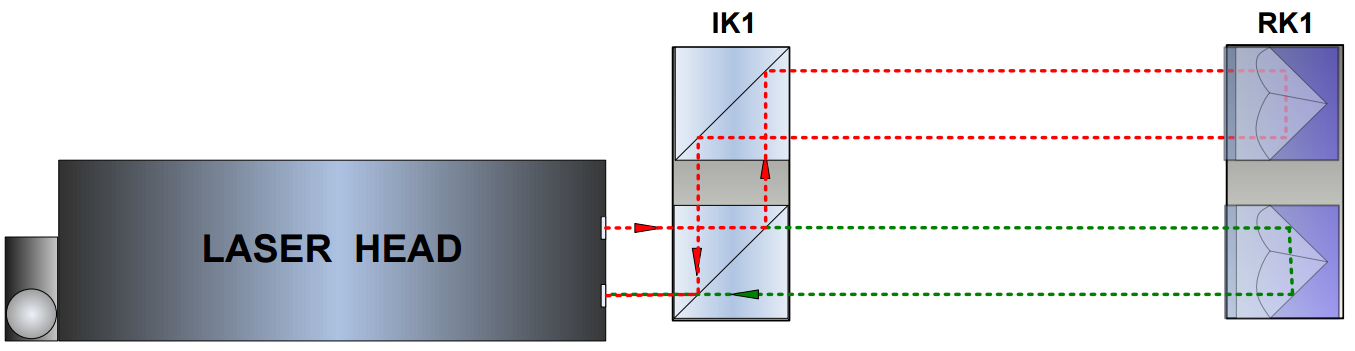
Dinamik açı ölçümleri, IK1 ve RK1 optik elemanlarının, şekil 13.5’te gösterildiği gibi lazer ışını boyunca hizalanmasını gerektirir. Öğelerin her biri hareket ettirilebilir. Açısal düzlük ölçümleri sırasında hava sıcaklık sensörünün kullanılması tavsiye edilir. Temel sıcaklık sensörlerinin kullanılmasına gerek yoktur.
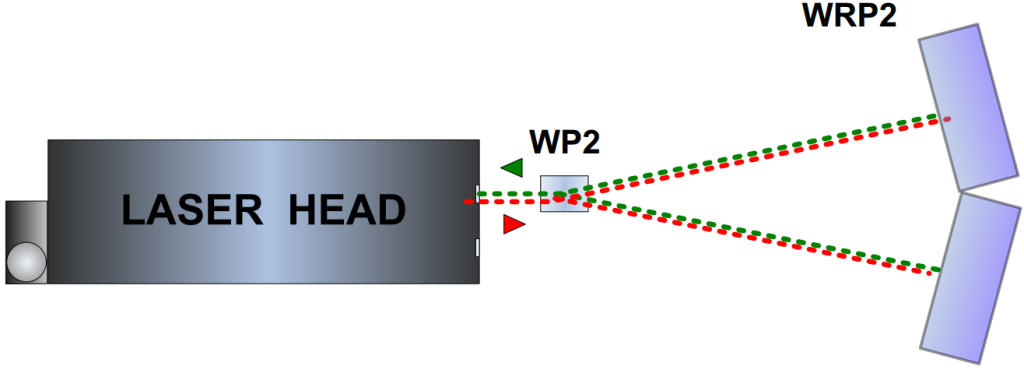
Açısal doğruluk (straightness)ölçümleri sadece lazer ışını boyunca (aşağıdaki şekillerde gösterildiği gibi) değil, aynı zamanda lazer ışınına dik yönlerde de yapılabilir. Bu konfigürasyonlar şekil 13.7 ve 13.8’de gösterilmiştir. Bu iki konfigürasyonda sadece geri yansıtıcı RK1 hareket ettirilebilir.