Metoda kątowa
Metoda Wollastona
Metoda 3D
Metoda kątowa
 Jakiej optyki użyć?
Jakiej optyki użyć?
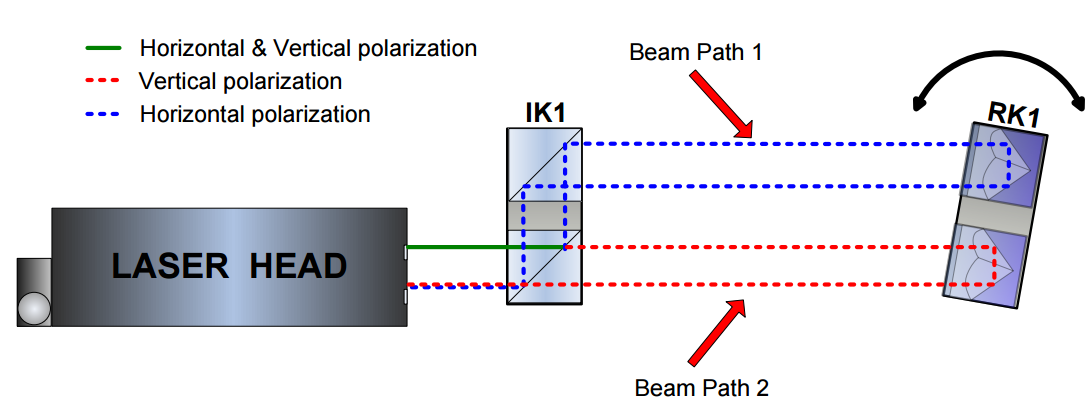
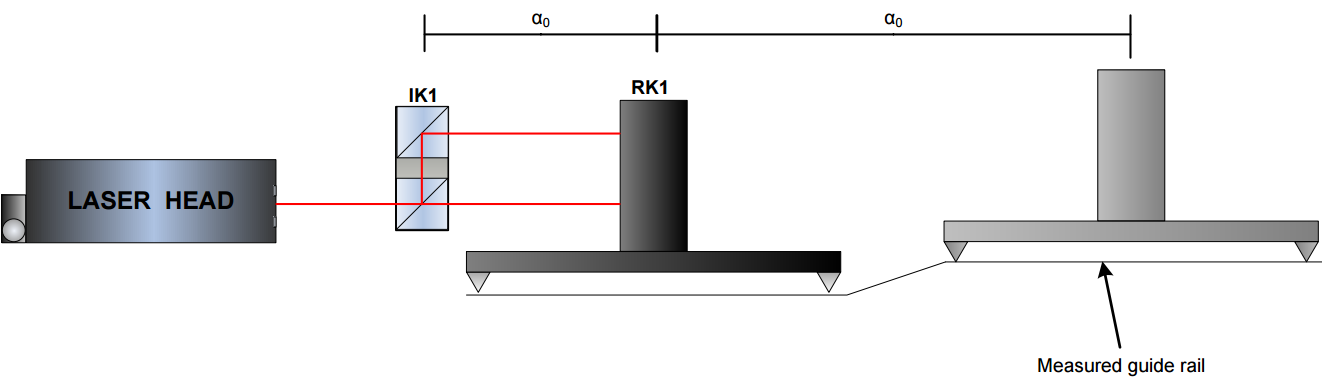
Na obrazku widać zastosowanie metody pomiaru kątowego. Możesz użyć urządzenia HPI-3D z optyką kątową. Emiter laserowy generuje dwa spolaryzowane wiązki laserowe: poziomy (H) i pionowy (V). Jest to możliwe dzięki ustawieniu rozdzielacza wiązek wewnątrz IK1 pod kątem Brewstera. Obie wiązki są skierowane na ścieżkę pomiarową, ale równolegle przesunięte o odległość 1’’ lub 2’’ (w zależności od wersji).
Proces pomiarowy
Podczas procesu pomiarowego zmieniasz odległość między elementami optycznymi. W rezultacie częstotliwość obu wiązek zmienia się zgodnie z efektem Dopplera. Należy pamiętać, że głowica laserowa rejestruje ruch tylko wtedy, gdy występuje obrót IK1 w stosunku do RK1. Na przykład, gdy istnieje różnica w długościach ścieżek wiązek. Użyj zmierzonej odległości do obliczenia kąta obrotu (przechylenia lub pochylenia maszyny) lub ruchu wertykalnego komponentu optycznego (IK1 lub RK1).
Głowica laserowa z optyką kątową jest niewrażliwa na ruchy liniowe.
Na obrazku schematycznie przedstawiono RK1 na wózku ze wszystkimi istotnymi parametrami do obliczeń. Dla jasności położenie IK1 traktowane jest jako odniesienie. Znaczenie parametrów to: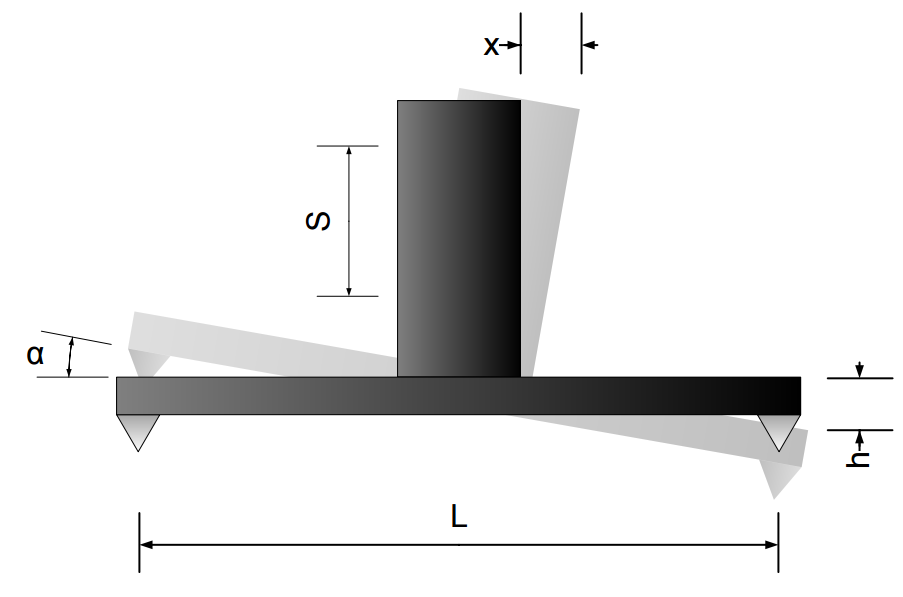
L – długość podstawy;
s – odległość między wiązkami na elementach IK1 i RK1;
x – odległość zmierzona przez głowicę laserową
α – kąt obrotu elementu RK1
h – różnica wysokości między dwoma punktami pomiarowymi
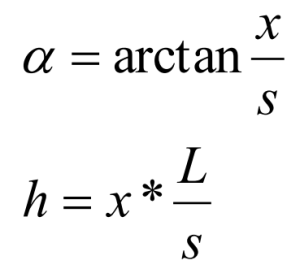
Głowica laserowa mierzy parametr x. Innymi słowy, odległość między wiązkami s i długość podstawy L muszą być ustawione w parametrach oprogramowania HPI. Następnie oprogramowanie może obliczyć kąt obrotu α i ruch w kierunku wertykalnym h. Formuła obliczeń:
Zastosowanie
Użyj optyki kątowej do następujących rodzajów pomiarów:
- Pomiar przechyłu lub pochylenia maszyny
- Pomiar prostoliniowości podstawy maszyny
- Pomiar małych kątów
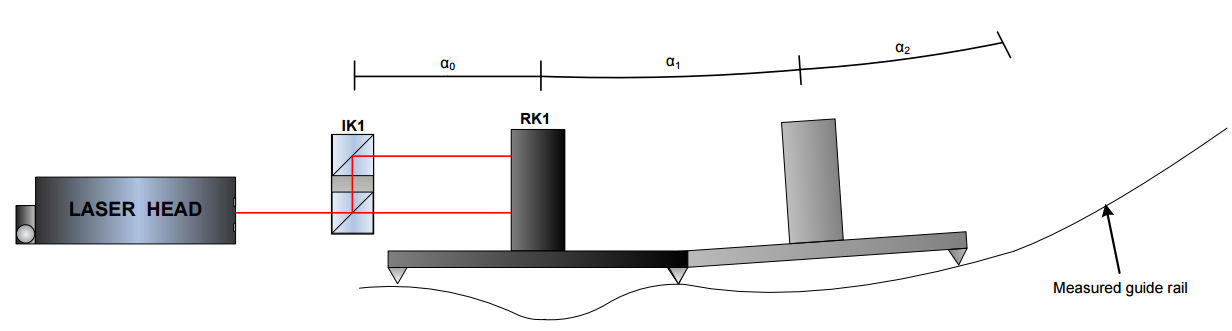 Dla wyjaśnienia pierwszych dwóch zastosowań zobacz obrazek. Przesuń zestaw pryzmatów RK1 na wózku wzdłuż pomierzonej prowadnicy. Wykonuj pomiary co 100 mm . Długość wózka zwykle wynosi 100mm, aby było to bardziej wygodne. W ten sam sposób użyj f
Dla wyjaśnienia pierwszych dwóch zastosowań zobacz obrazek. Przesuń zestaw pryzmatów RK1 na wózku wzdłuż pomierzonej prowadnicy. Wykonuj pomiary co 100 mm . Długość wózka zwykle wynosi 100mm, aby było to bardziej wygodne. W ten sam sposób użyj f
ormuł z poprzedniego rozdziału do obliczenia kątów (dla pomiarów przechyłu/pochylenia) lub przesunięć wertykalnych (dla pomiarów prostoliniowości).
Warto zauważyć, że taki sposób pomiaru prostoliniowości wymaga odpowiedniego wyboru punktów pomiarowych. Innymi słowy, wybór punktów gęstszych niż rozmiar wózka prowadzi do nadmiernych wartości błędów prostoliniowości. Ale kształt błędu jest właściwy.
 Jeśli wybierzesz punkty zbyt rzadko, może to wpłynąć zarówno na kształt, jak i wartość błędu, jak pokazano na poniższym rysunku. W tym szczególnym przypadku zmierzona odległość między wiązkami nie zmieni się, ponieważ zbyt rzadkie punkty pomiarowe spowodują, że laser nie zauważy zmiany kształtu prowadnicy!
Jeśli wybierzesz punkty zbyt rzadko, może to wpłynąć zarówno na kształt, jak i wartość błędu, jak pokazano na poniższym rysunku. W tym szczególnym przypadku zmierzona odległość między wiązkami nie zmieni się, ponieważ zbyt rzadkie punkty pomiarowe spowodują, że laser nie zauważy zmiany kształtu prowadnicy!
Pomiar małych kątów
Pomiar małych kątów pozwala na bardzo dokładne pomiary małych obrotów. Jednak należy spełnić następujące dwa warunki:
1. Mierzony kąt mieści się w zakresie ±5 stopni
2. Odległość między RK1 a głowicą laserową nie zmienia się więcej niż kilka centymetrów.
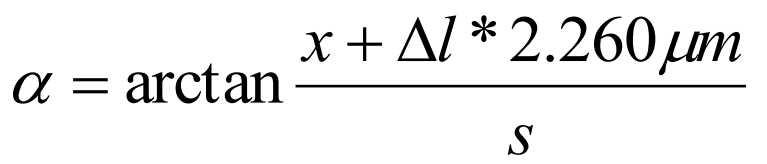 Drugie ograniczenie wynika z efektu heterodynacji obecnego w laserze HPI-3D. Ten efekt wpływa na kąt zgodnie z (Δl to zmiana odległości między laserem a RK1 podczas pomiarów)
Drugie ograniczenie wynika z efektu heterodynacji obecnego w laserze HPI-3D. Ten efekt wpływa na kąt zgodnie z (Δl to zmiana odległości między laserem a RK1 podczas pomiarów)
Metoda Wollastona
Optyka Wollastona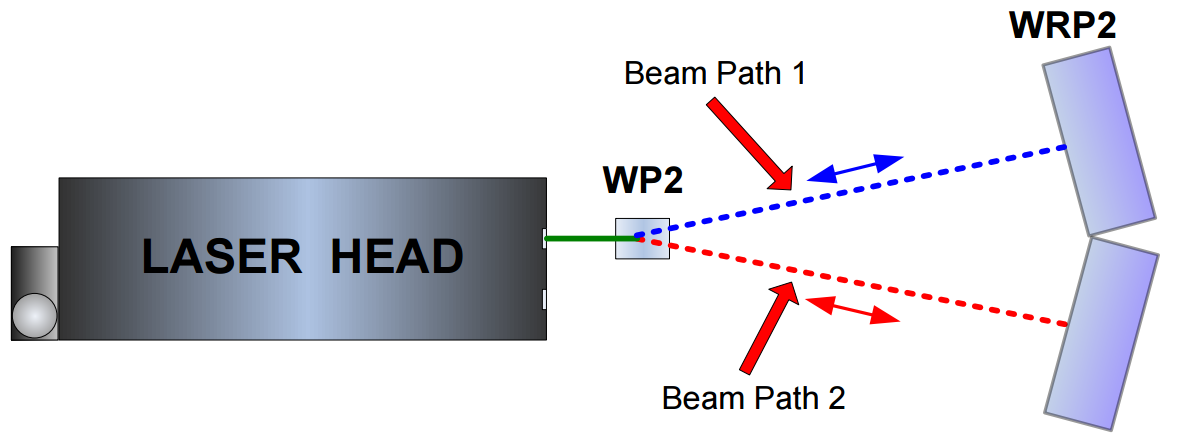
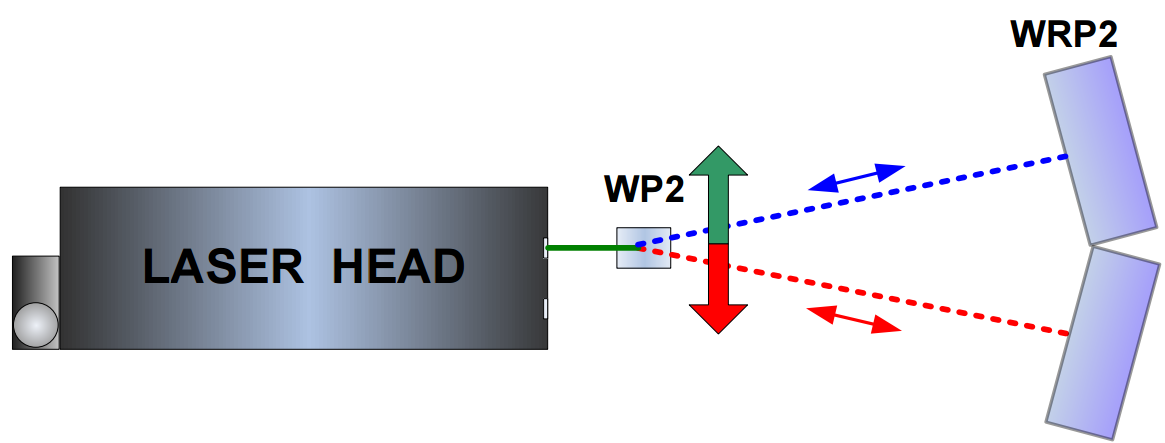
Inny sposób pomiaru prostoliniowości, równoległości i prostokątności za pomocą interferometru laserowego wymaga użycia optyki typu Wollastona. Optyka składa się z dwóch elementów: pryzmatu polaryzującego Wollastona WP2 oraz sparowanego odbłyśnika WRP2 – patrz rysunek poniżej. Wiązka laserowa, składająca się z dwóch prostopadłych polaryzacji, jest rozdzielana przez element WP2 na dwie wiązki. Wiązki opuszczają WP2 pod pewnym kątem, a następnie, po odbiciu się od odbłyśnika WRP2, wracają do głowicy laserowej. Laser mierzy różnicę długości dróg wiązek.
Konstrukcja pryzmatu
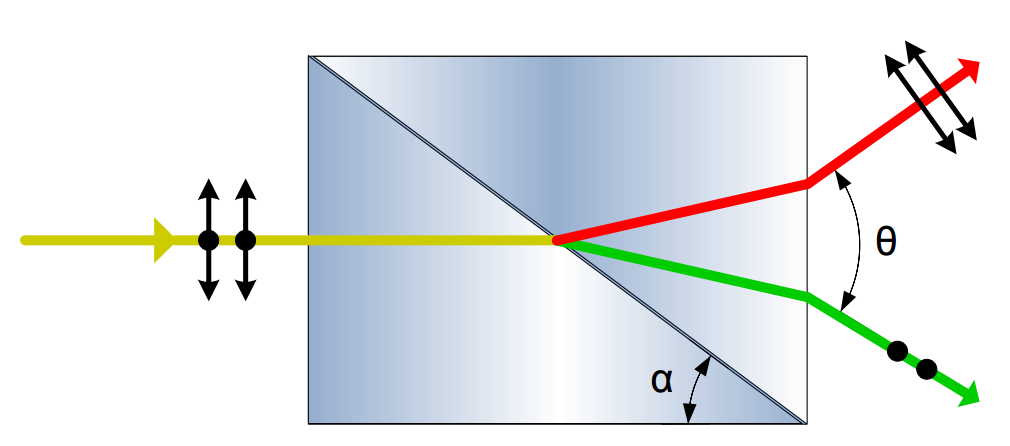
Na rysunku widać działanie elementu WP2. Ten pryzmat składa się z dwóch trójkątnych pryzm dwójłomnych sklejonych razem. Obydwa pryzmaty są zbudowane z tego samego materiału, ale ich osie zwyczajne i nadzwyczajne są wzajemnie prostopadłe, czyli współczynnik załamania dla osi zwyczajnej lewego pryzmatu nol równy jest wartości współczynnika osi nadzwyczajnej prawego pryzmatu ner.
Z tego powodu wiązki laserowe o ortogonalnej polaryzacji wpadające do elementu Wollastona są odchylane pod różnymi kątami na środkowej granicy warstwy i na prawej granicy warstwy. To zachowanie można łatwo udowodnić za pomocą prawa Snella. Kąt między wychodzącymi wiązkami często oznacza się jako Θ.
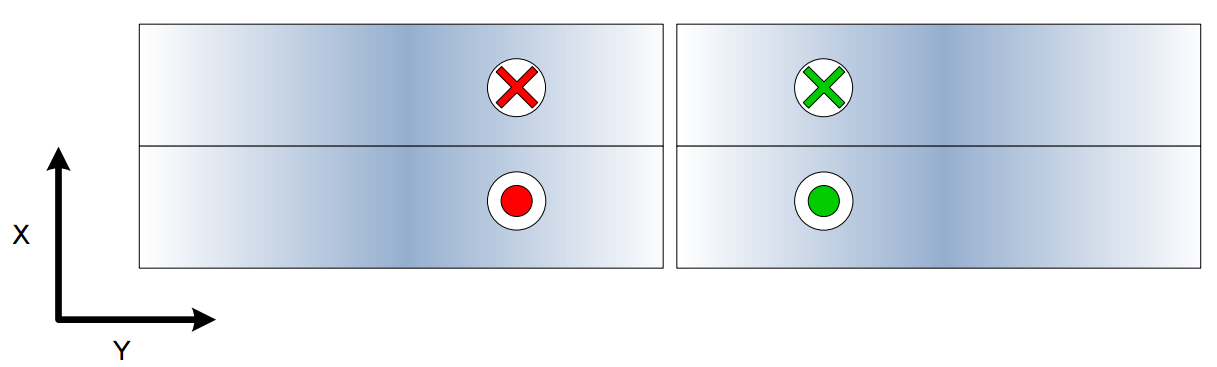 W przeciwieństwie do optyki kątowej, odległość między wiązkami zmienia się wraz z odległością, co utrudnia konstrukcję elementu odbijającego. Na poniższych rysunkach pokazana jest konstrukcja elementu odbijającego dla optyki Wollastona WRP2. Składa się on z dwóch specjalnych pryzm szklanych dokładnie sklejonych pod kątem 180-Θ. Pryzmaty używane w WRP2 w osi y odbijają wiązkę z przesunięciem ½’’ (jak w retroreflektorze RL1). W osi x wiązka jest odbijana bez przesunięcia (jak w lustrze).
W przeciwieństwie do optyki kątowej, odległość między wiązkami zmienia się wraz z odległością, co utrudnia konstrukcję elementu odbijającego. Na poniższych rysunkach pokazana jest konstrukcja elementu odbijającego dla optyki Wollastona WRP2. Składa się on z dwóch specjalnych pryzm szklanych dokładnie sklejonych pod kątem 180-Θ. Pryzmaty używane w WRP2 w osi y odbijają wiązkę z przesunięciem ½’’ (jak w retroreflektorze RL1). W osi x wiązka jest odbijana bez przesunięcia (jak w lustrze).

Głowica laserowa z optyką Wollastona jest wrażliwa na ruchy kątowe odbłyśnika!
 Użycie optyki Wollastona umożliwia pomiar względnego ruchu elementu WP2 w osi prostopadłej do wiązki laserowej. Jak pokazano na rysunku poniżej, pomiary są MOŻLIWE TYLKO z ruchem WP2.
Użycie optyki Wollastona umożliwia pomiar względnego ruchu elementu WP2 w osi prostopadłej do wiązki laserowej. Jak pokazano na rysunku poniżej, pomiary są MOŻLIWE TYLKO z ruchem WP2.
Ze względu na wrażliwość odczytu lasera na ruch kątowy WRP2 ważne jest, aby podczas pomiarów element WRP2 nie był ani dotykany, ani przesuwany.
Uwagi dotyczące zastosowania
Choć jest możliwe pomiar prostoliniowości zarówno z ruchem elementu WP2, jak i WRP2, istnieją pewne różnice. W przypadku WRP2 ten element powinien pozostać nieruchomy podczas pomiaru (tj. nie powinien być przesuwany wzdłuż wiązki laserowej). Ponieważ WRP2 zachowuje się w jednej z osi jak lustro, jakiekolwiek ruchy kątowe WRP2 w tej osi mogą spowodować, że wiązka laserowa nie wróci do głowicy lasera i znacząco wpłynąć na wyniki pomiarów!
Nie ma takich problemów, gdy zamiast tego porusza się WP2. Jedyną wadą jest mniejszy zakres pomiarowy. WP2 może być przesuwany ±2mm, podczas
Metoda 3D
 Głowica laserowa HPI-3D jest zdolna do wykrywania pozycji wiązki powrotnej. Pozycja wiązki powrotnej zmienia się wraz z ruchem retroreflektora RL1 prostopadle do osi wiązki laserowej. To zjawisko dla jednej osi jest pokazane na poniższym rysunku. Wiązka wracająca z interferometru liniowego IL1 jest traktowana jako odniesienie, podczas gdy wiązka odbita przez RL1 jest wiązką pomiarową. Laser jednocześnie rejestruje informacje o zmianach pozycji elementu optycznego w obu osiach prostopadłych do osi wiązki laserowej.
Głowica laserowa HPI-3D jest zdolna do wykrywania pozycji wiązki powrotnej. Pozycja wiązki powrotnej zmienia się wraz z ruchem retroreflektora RL1 prostopadle do osi wiązki laserowej. To zjawisko dla jednej osi jest pokazane na poniższym rysunku. Wiązka wracająca z interferometru liniowego IL1 jest traktowana jako odniesienie, podczas gdy wiązka odbita przez RL1 jest wiązką pomiarową. Laser jednocześnie rejestruje informacje o zmianach pozycji elementu optycznego w obu osiach prostopadłych do osi wiązki laserowej.
Pomierzona pozycja jest następnie używana do precyzyjnej kontroli wyrównania ścieżki wiązki laserowej lub do pomiarów prostoliniowości, prostokątności lub równoległości. Pomiar 3D zwraca wartości bezwzględne pozycji wiązki. Jest to różne od głównej osi pomiarowej interferometrycznej, gdzie uzyskane wyniki są przyrostowe.
Uwagi dotyczące zastosowania
Opcję 3D można wykorzystać do szybkiej oceny prostoliniowości jednocześnie w dwóch osiach, ale z pewnymi ograniczeniami wynikającymi z fizycznej natury pomiarów.
W przeciwieństwie do wszystkich pomiarów interferometrycznych, głowica lasera bierze aktywny udział w pomiarach, tj. jej pozycja i drgania wpływają na wyniki pomiarów. Z tego powodu ważne jest unikanie stosowania statywu i bezpośrednie przymocowanie głowicy lasera do mierzonej maszyny.
Pomiar 3D opiera się na pozycji wiązki powrotnej na urządzeniu czułym na pozycję. Dlatego ważne jest, aby wiązka pozostawała w zakresie pomiarowym urządzenia, tj. ±1 mm. Użycie opcji 3D poza tym zakresem może prowadzić do niestabilnych wyników.
Podobnie jak we wszystkich pomiarach prostoliniowości opartych na laserze, turbulencje powietrza mają wpływ na wyniki. Niewielkie wędrowanie wiązki laserowej może być uwzględnione przez obwód przetwarzania sygnałów wewnątrz lasera poprzez zmianę czasu uśredniania (patrz Opis oprogramowania dla więcej szczegółów). Jeśli ruchy powietrza są zbyt duże – tj. gdy wiązka wracająca do lasera wędruje poza okno ±1 mm – wyniki pomiarów 3D mogą stać się nieprzydatne. W takiej sytuacji konieczne jest zastosowanie jakiegoś zabezpieczenia przed ruchem powietrza lub wentylatora wymuszającego ruch powietrza. Problem z turbulencjami powietrza jest bardziej uciążliwy dla większych odległości między głowicą lasera a elementem RL1.