Método angular
Método Wollatson
Método 3D
Método angular
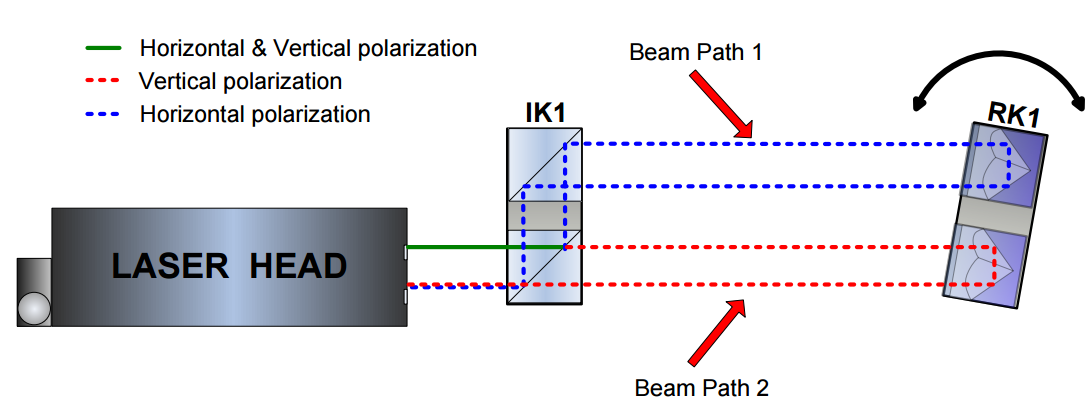 El funcionamiento de HPI-3D con la óptica angular utilizada se muestra en la siguiente Figura. El cabezal láser emite el rayo láser que consta de dos polarizaciones: horizontal (H) y vertical (V). Es posible porque el divisor de haz dentro de IK1 se establece en el ángulo de Brewster. Ambos haces se dirigen hacia la trayectoria de medición, pero se desplazan en paralelo a una distancia de 1 “o 2 ” (según la versión).
El funcionamiento de HPI-3D con la óptica angular utilizada se muestra en la siguiente Figura. El cabezal láser emite el rayo láser que consta de dos polarizaciones: horizontal (H) y vertical (V). Es posible porque el divisor de haz dentro de IK1 se establece en el ángulo de Brewster. Ambos haces se dirigen hacia la trayectoria de medición, pero se desplazan en paralelo a una distancia de 1 “o 2 ” (según la versión).
Cuando se altera la distancia entre los elementos ópticos, la frecuencia de ambos haces cambia según el efecto Doppler. El cabezal del láser nota un movimiento sólo si hay una rotación de IK1 frente a RK1, es decir, cuando hay una diferencia en las longitudes de las trayectorias del haz. La distancia medida se puede utilizar para obtener el ángulo de rotación (cabeceo o guiñada de la máquina) o el movimiento vertical del componente óptico (IK1 o RK1).
El cabezal láser con óptica angular es insensible a los movimientos lineales.
En la figura de abajo se muestra esquemáticamente un RK1 sobre un carro con todos los parámetros más significativos para el cálculo. Para mayor claridad, la posición de IK1 se trata como referencia. El significado de los parámetros es:
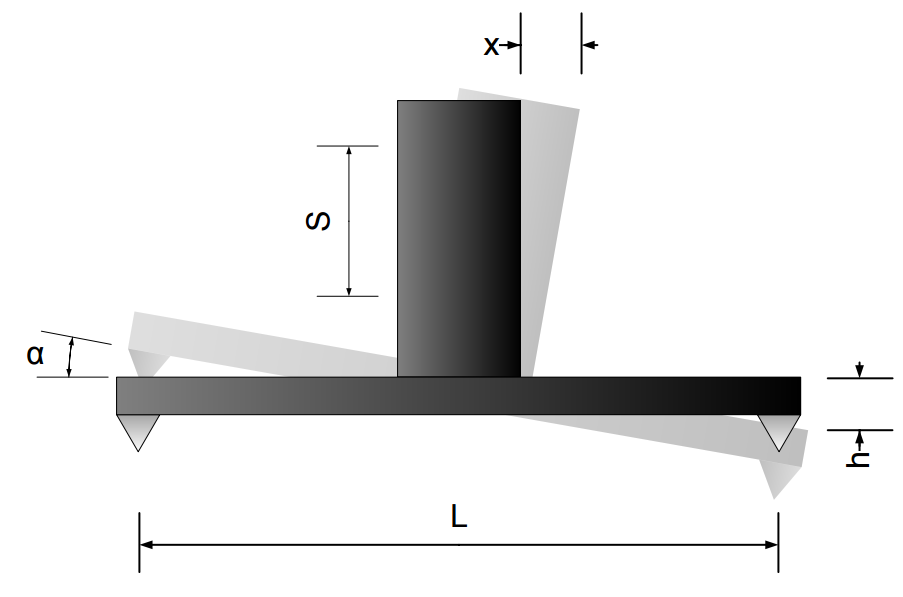
L – longitud de la base ;
s – distancia entre haces en elementos IK1 y RK1 ;
x – distancia medida por el cabezal láser
α – rotación angular del elemento RK1
h – diferencia de altura entre dos puntos de medición
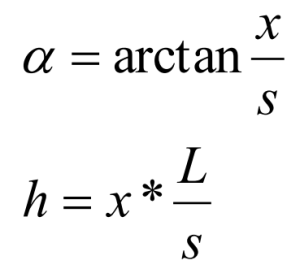
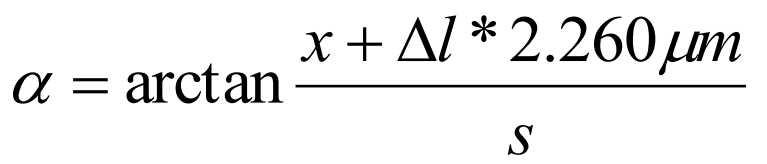
El cabezal láser mide el parámetro x, mientras que la distancia entre los haces s y
la longitud base L debe establecerse en los parámetros del software HPI. Dicho esto, el ángulo de rotación α y el movimiento en la dirección vertical h se pueden calcular a partir de:
Aplicaciones
La óptica angular se puede utilizar para:
-
Medición del desvío angular de una máquina, obtención de cabeceo y guiñada
-
Medición de la rectitud de la bancada de una máquina
-
Medida de pequeños ángulos
Medición del desvío de una máquina y rectitud de la bancada de una máquina
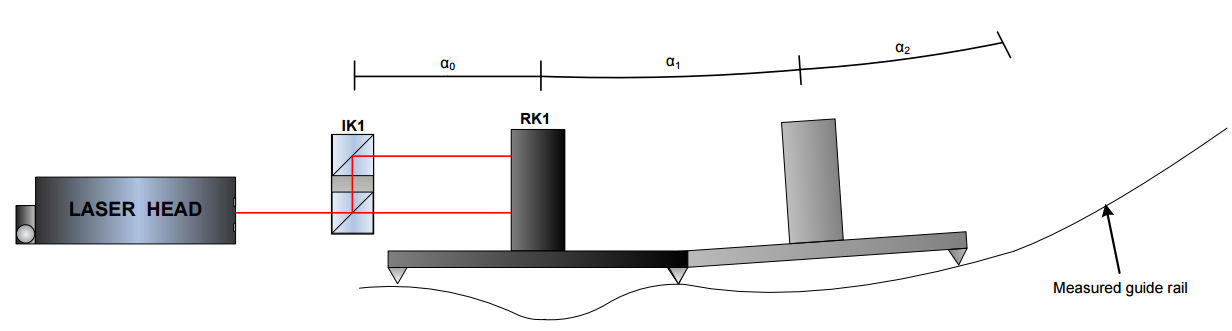 La explicación de las dos primeras aplicaciones se muestra en la siguiente figura. El RK1 montado en un carro se traslada sobre el carril guía medido. En cada longitud del carro (normalmente 100 mm) se realiza una medición. Las fórmulas del apartado anterior se utilizan para calcular los ángulos (para medidas de desviación) o las traslaciones verticales (para medidas de rectitud).
La explicación de las dos primeras aplicaciones se muestra en la siguiente figura. El RK1 montado en un carro se traslada sobre el carril guía medido. En cada longitud del carro (normalmente 100 mm) se realiza una medición. Las fórmulas del apartado anterior se utilizan para calcular los ángulos (para medidas de desviación) o las traslaciones verticales (para medidas de rectitud).
Cabe señalar que dicho método de medición de rectitud requiere una elección adecuada de los puntos de medición. La elección de puntos más densos que el tamaño del carro da como resultado valores excesivos de los errores de rectitud (la forma del error es la correcta).
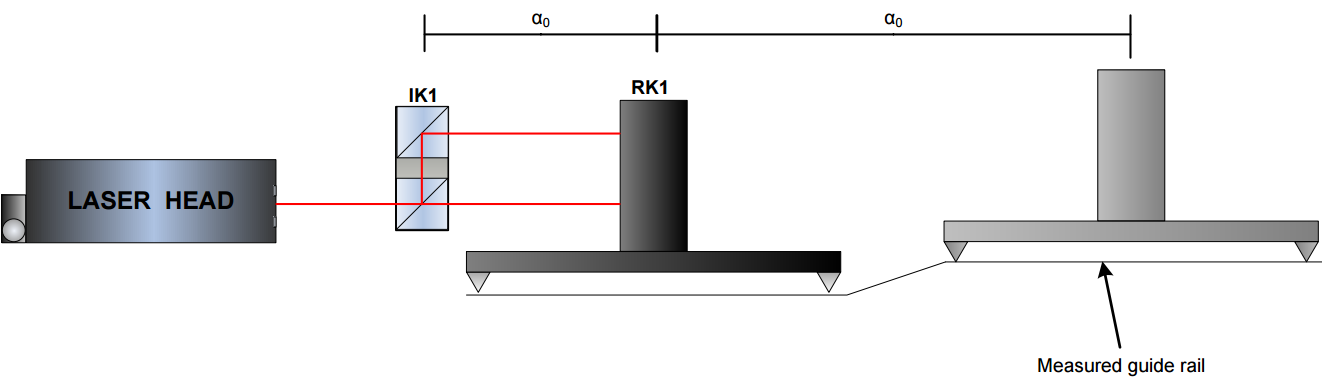
La elección de puntos demasiado dispersos puede afectar tanto a la forma como al resultado del error, como se muestra en la figura siguiente. En este caso especial, debido a que los puntos de medición son demasiado escasos, el láser no notará el cambio en la forma del riel de guía; la distancia medida entre los rayos no cambiará.
Medida de pequeños ángulos
La medición de ángulos pequeños permite mediciones muy precisas de pequeñas rotaciones si se cumplen dos condiciones:
1. el ángulo medido está dentro de ± 5 grados
2. La distancia entre RK1 y el cabezal láser no cambia más de unos pocos centímetros.
La segunda limitación proviene del efecto heterodino presente en el láser HPI-3D. Este efecto influye según el ángulo ( Δl es el cambio de distancia entre el láser y RK1 durante las mediciones)
Método Wollatson
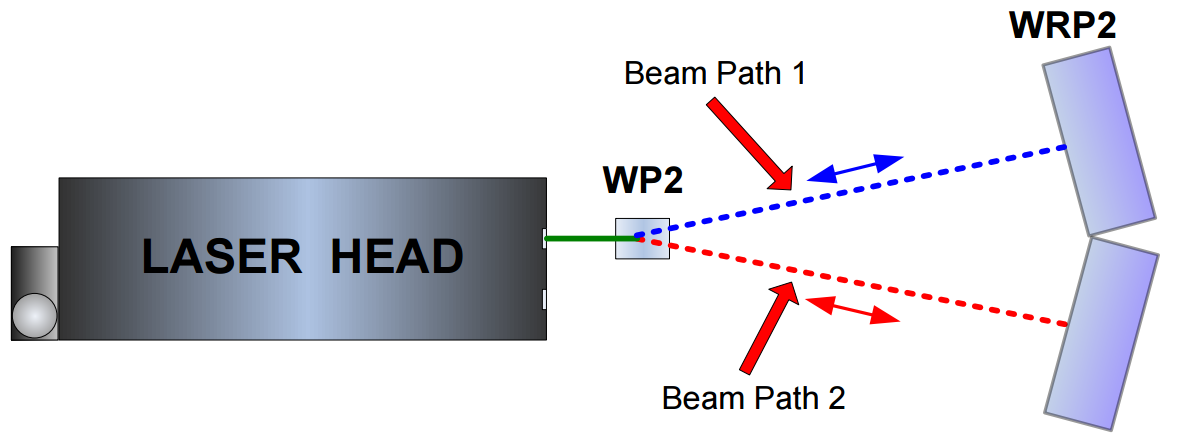
Otra forma de medir la rectitud, el paralelismo y la perpendicularidad con el interferómetro láser requiere el uso de ópticas de tipo Wollaston. La óptica consta de dos elementos: el prisma polarizador Wollaston WP2 y un reflector emparejado WRP2; como se muestra en la figura. El rayo láser, que consta de dos polarizaciones perpendiculares, es dividido por el elemento WP2 en dos rayos. Los rayos salen del WP2 en un cierto ángulo y luego, después de ser reflejados por el reflector WRP2, regresan al cabezal láser. El láser mide la diferencia entre las longitudes de las trayectorias de los haces.
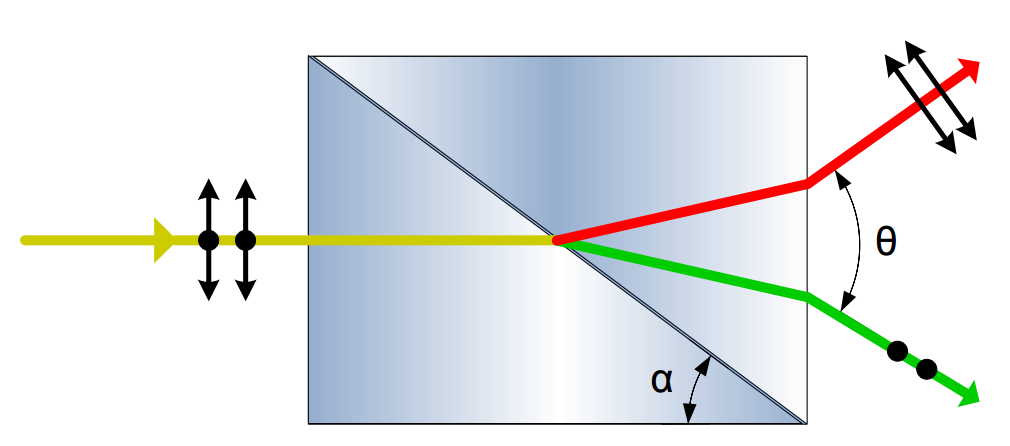
En la figura se muestra la explicación del funcionamiento del elemento WP2. Este prisma está construido con dos prismas triangulares birrefringentes cementados. Ambos prismas están construidos con el mismo material, pero sus ejes ordinario y extraordinario son perpendiculares entre sí, es decir, el coeficiente de refracción del eje ordinario del prisma izquierdo es distinto al del eje extraordinario del prisma derecho.
Debido a esto, los rayos láser polarizados ortogonalmente que entran en el elemento Wollaston se desvían en diferentes ángulos en la capa límite media y en la capa límite derecha. Este comportamiento se puede probar fácilmente con el uso de la ley de Snell. El ángulo entre los haces que salen se denota a menudo como θ.
A diferencia de la óptica angular, la separación entre los haces cambia con la distancia, lo que dificulta la construcción del elemento reflectante. En las figuras siguientes se muestra la construcción del elemento de reflexión para la óptica Wollaston WRP2. Se compone de dos prismas de vidrio especiales pegado muy precisamente en 180- θ ángulo. Los prismas utilizados en el WRP2 en el eje y reflejan el haz con traslación de ½” (como el retrorreflector RL1). En el eje x, el haz se refleja sin traslación (como en un espejo).

¡El cabezal láser con óptica Wollaston es sensible a los movimientos angulares del reflector!
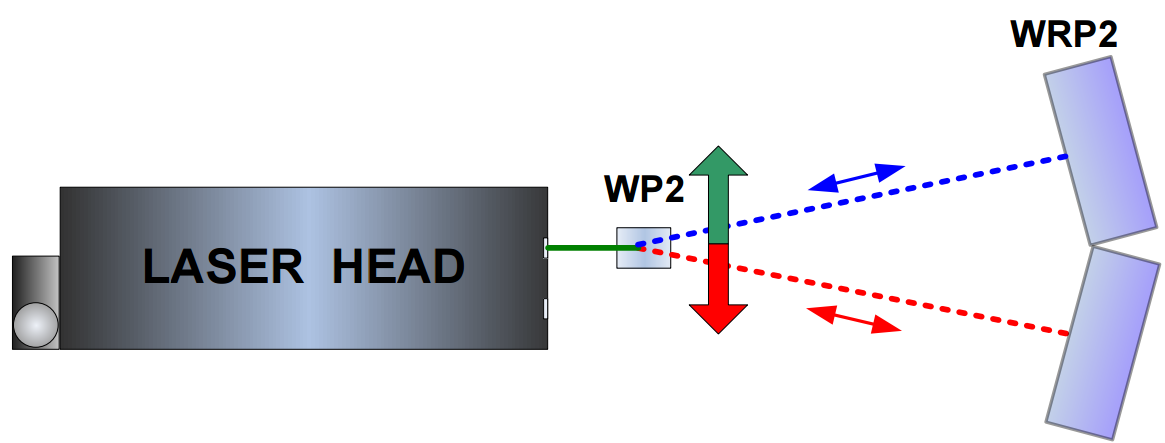
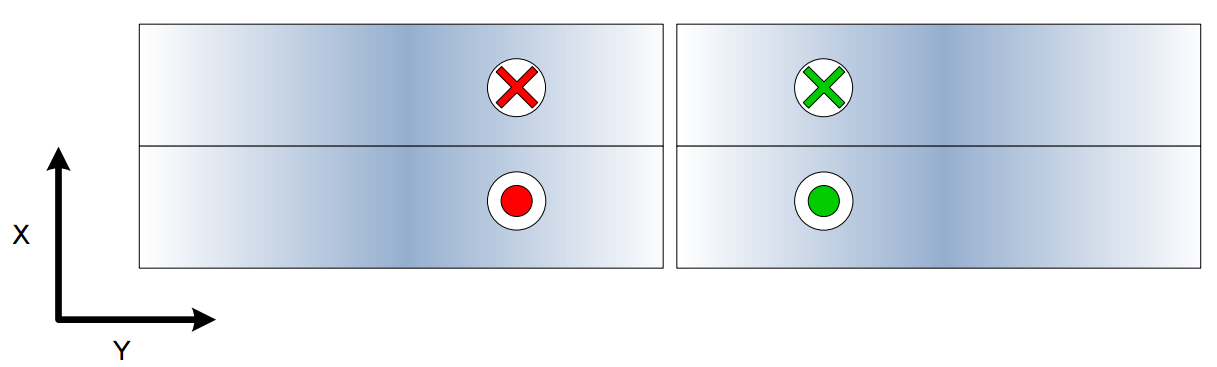
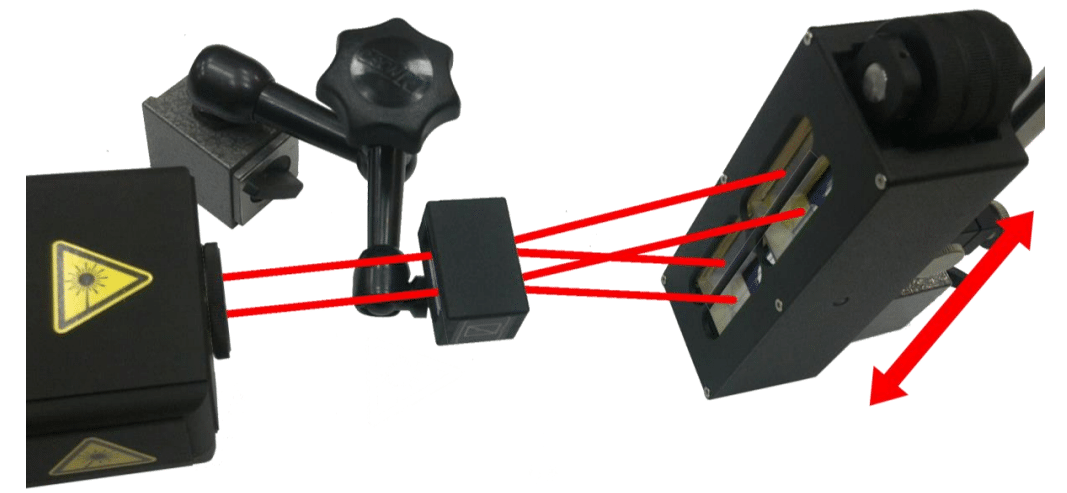
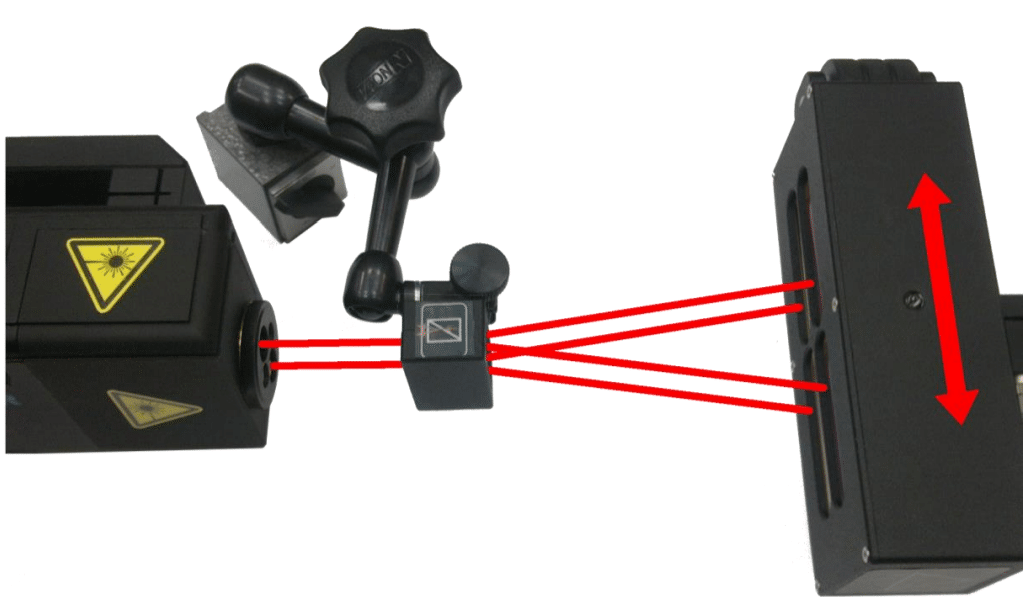
El uso de la óptica de Wollaston hace posible la medición del movimiento relativo del elemento WP2 en el eje perpendicular al rayo láser. Como se muestra en la siguiente figura, las medidas son posibles SÓLO con el movimiento WP2
Debido a la sensibilidad de la lectura del láser en el movimiento angular del WRP2, es importante que durante las mediciones el elemento WRP2 no se toque ni se mueva.
Aplicaciones
Aunque es posible medir la rectitud tanto con el movimiento del elemento de WP2 o como con el WRP2, se deben destacar ciertas diferencias. El elemento WRP2 debe estar fijo durante la medición (es decir, no debe moverse a lo largo del rayo láser). Al comportarse el WRP2 como un espejo en uno de los ejes, cualquier movimiento angular del WRP2 en este eje puede provocar que el rayo láser no regrese al cabezal láser e influirá significativamente en los resultados de la medición.
No hay tales problemas cuando se mueve el WP2. La única desventaja es el rango de medición más pequeño. Para WP2 se encuentra entre ± 2mm, mientras que el rango de medición máximo del WRP2 es ± 30mm (pero sólo cuando la distancia entre WP2 y WRP2 es de 4,5m).
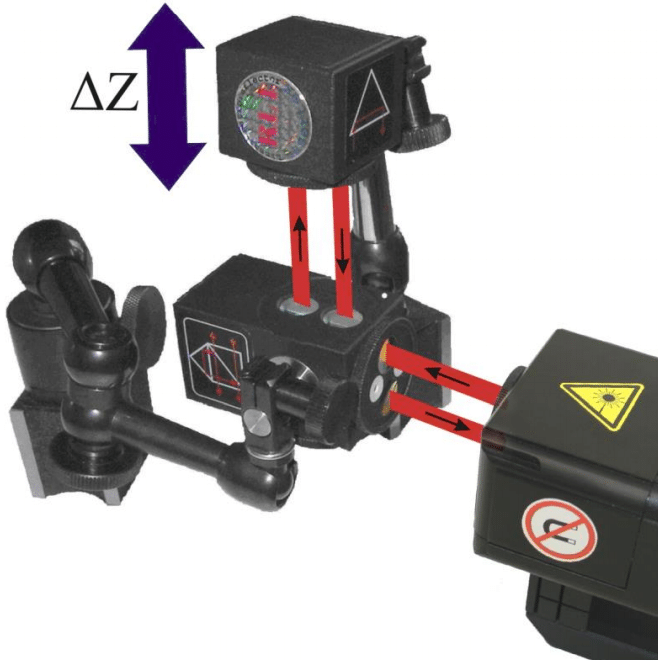
Método 3D
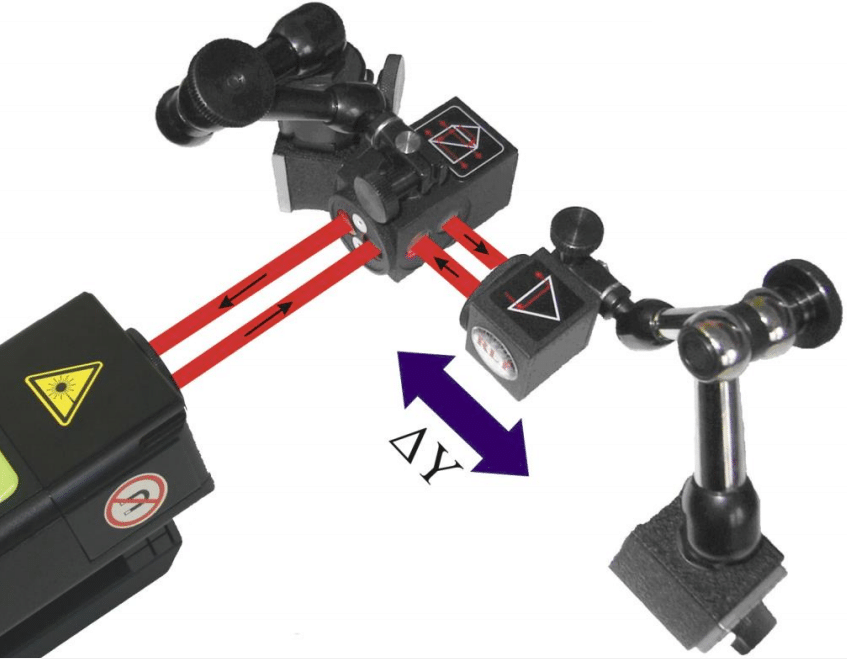
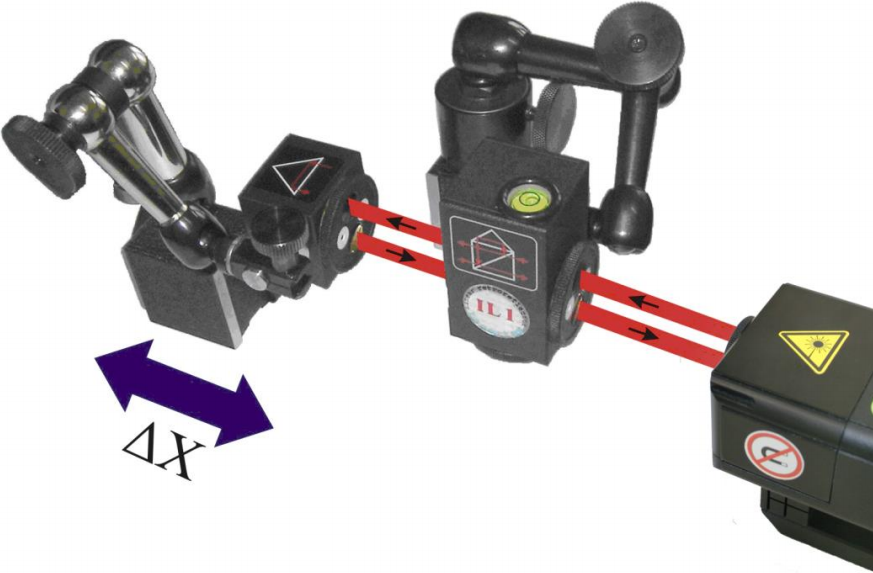
 El cabezal láser HPI-3D es capaz de detectar la posición del rayo de retorno. La posición del rayo de retorno cambia con el movimiento del retrorreflector RL1 perpendicular al eje del rayo láser. Este fenómeno se muestra para un eje en la siguiente figura. El haz que regresa del interferómetro lineal IL1 se trata como referencia, mientras que el haz reflejado por RL1 como haz de medición. El láser registra simultáneamente información sobre los cambios de posición de un componente óptico en ambos ejes perpendiculares al rayo láser.
El cabezal láser HPI-3D es capaz de detectar la posición del rayo de retorno. La posición del rayo de retorno cambia con el movimiento del retrorreflector RL1 perpendicular al eje del rayo láser. Este fenómeno se muestra para un eje en la siguiente figura. El haz que regresa del interferómetro lineal IL1 se trata como referencia, mientras que el haz reflejado por RL1 como haz de medición. El láser registra simultáneamente información sobre los cambios de posición de un componente óptico en ambos ejes perpendiculares al rayo láser.
La posición medida se utiliza luego para un control preciso de la alineación de la trayectoria del rayo láser o para las mediciones de rectitud, perpendicularidad o paralelismo. La medición 3D devuelve valores absolutos de la posición del haz. Esto es diferente del eje principal de medición interferométrica, donde los resultados obtenidos son incrementales.
Aplicaciones
La opción 3D se puede utilizar para una estimación rápida de la rectitud simultáneamente en dos ejes, pero con algunas limitaciones derivadas de la naturaleza física de las mediciones.
A diferencia de todas las mediciones interferométricas, el cabezal láser participa activamente en las mediciones, es decir, su posición y sus vibraciones influyen en los resultados de la medición. Por esta razón, es importante evitar el uso del trípode y fijar el cabezal láser directamente en la máquina medida.
Esta medición se basa en la posición del rayo de retorno en el dispositivo sensible a la posición. Por tanto, es importante que el haz permanezca dentro del rango de medición del dispositivo, es decir, ± 1mm. El uso de la opción 3D fuera de este rango produciría resultados poco fiables.
De manera similar a todas las mediciones de rectitud basadas en láser, las turbulencias de aire influyen en los resultados. El circuito de procesamiento de señales dentro del láser puede adaptarse a una pequeña desviación del rayo láser con el cambio del tiempo promedio (consulte la Descripción del software para obtener más detalles). Si los movimientos del aire son demasiado grandes, es decir, cuando el rayo que regresa al láser se desplaza fuera del rango de ± 1 mm, los resultados de las mediciones 3D pueden resultar inutilizables. En tal situación, se debe utilizar alguna protección contra el movimiento del aire o un ventilador que fuerce el movimiento del aire. El problema de las turbulencias de aire es más problemático para distancias más grandes entre el cabezal láser y el elemento RL1.