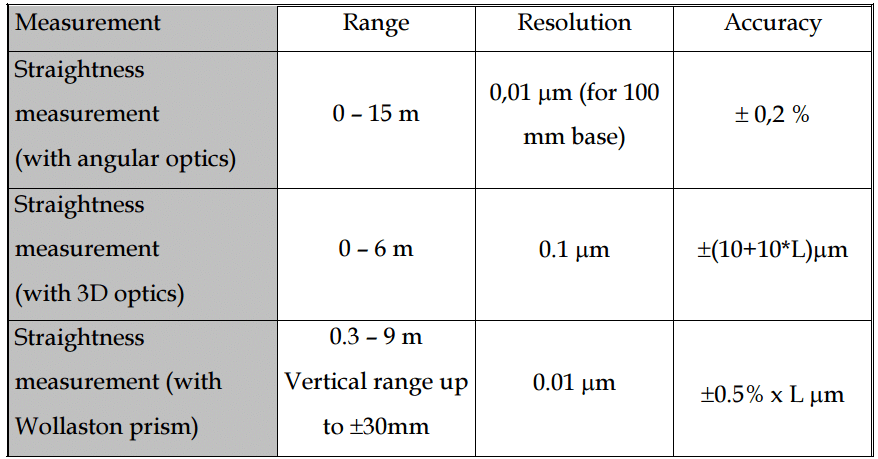
في جهاز HPI-3D ، يمكن إجراء قياسات الاستقامة بثلاث طرق مختلفة: Angular و Wollaston و 3D.
تم تصميم الطريقة الزاويّة لاستخدامها في قياسات استقامة القاعدة (مثل أداة التوليف البصري) ؛
تم تصميم طريقة ولاستون لقياسات “الحركة في الفضاء” – على سبيل المثال يمكن تمييز حركة طاولة الآلة أو أداة العمل ؛
تُستخدم الطريقة ثلاثية الأبعاد لتقدير سريع “للحركة في الفضاء” – مثل طريقة ولاستون ولكن يتم إجراء القياس في المحاور الثلاثة في وقت واحد.
يتم وصف المعلمات الرئيسية لهذه الطرق في بيانات Lasertex الفنية أدناه.
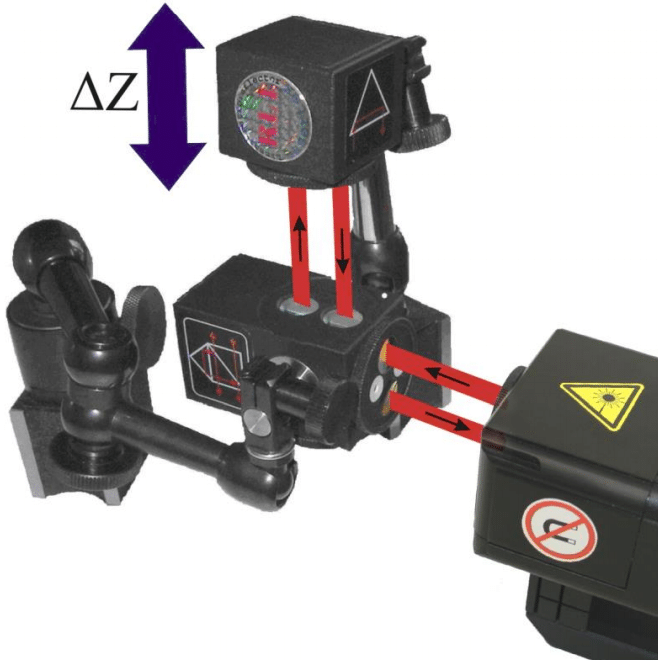
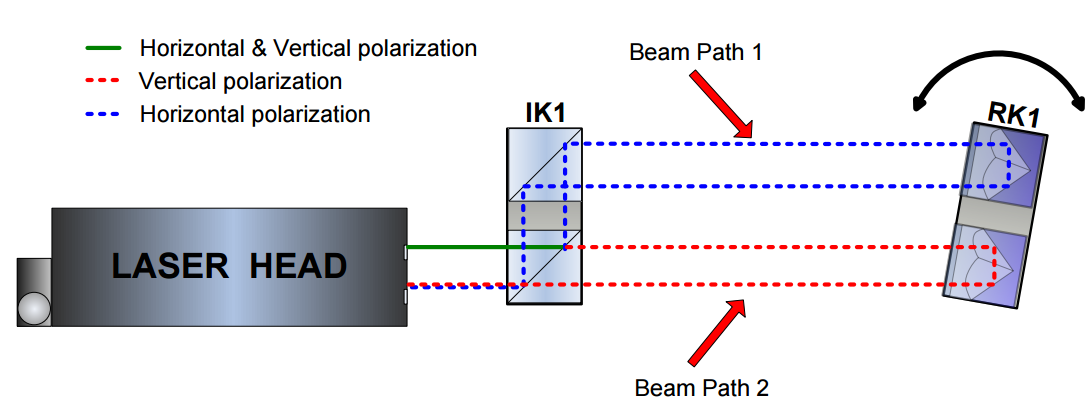 يوضح الشكل أدناه تشغيل HPI-3D مع البصريات الزاوية المستخدمة. يخرج الليزر شعاع الليزر المكون من قطبين: أفقي (H) وعمودي (V). هذا ممكن لأن شعاع الشعاع داخل IK1 مضبوط على زاوية Brewster. يتم توجيه كلا الشعاعين إلى مسار القياس ولكن يتم إزاحتهما بالتوازي بمسافة 1 “أو 2” (حسب الإصدار).
يوضح الشكل أدناه تشغيل HPI-3D مع البصريات الزاوية المستخدمة. يخرج الليزر شعاع الليزر المكون من قطبين: أفقي (H) وعمودي (V). هذا ممكن لأن شعاع الشعاع داخل IK1 مضبوط على زاوية Brewster. يتم توجيه كلا الشعاعين إلى مسار القياس ولكن يتم إزاحتهما بالتوازي بمسافة 1 “أو 2” (حسب الإصدار).
عندما تتغير المسافة بين العناصر الضوئية ، يتغير تردد كلا الشعاعين وفقًا لتأثير دوبلر. لا يلاحظ رأس الليزر الحركة إلا إذا كان هناك دوران لـ IK1 مقابل RK1 ، أي عندما يكون هناك اختلاف في أطوال مسارات الحزمة. يمكن بعد ذلك استخدام المسافة المقاسة للحصول على زاوية الدوران (درجة الانحراف أو الانحراف للآلة) أو الحركة الرأسية للمكون البصري (IK1 أو RK1).
رأس الليزر ذو البصريات الزاوية غير حساس للحركات الخطية..
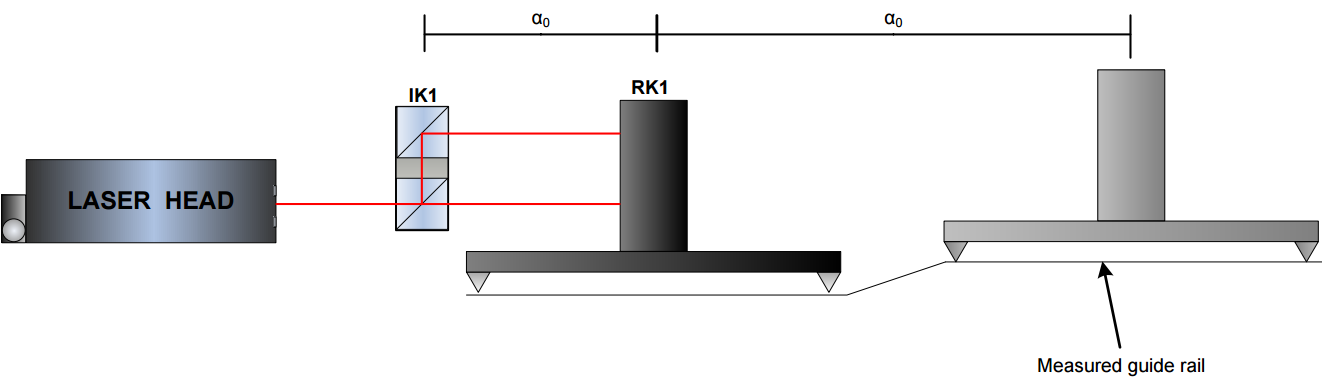
في الشكل الموجود على اليمين ، يظهر بشكل تخطيطي RK1 على عربة مع جميع المعلمات المهمة للحساب. من أجل الوضوح ، يتم التعامل مع موضع IK1 كمرجع. معنى المعلمات هو: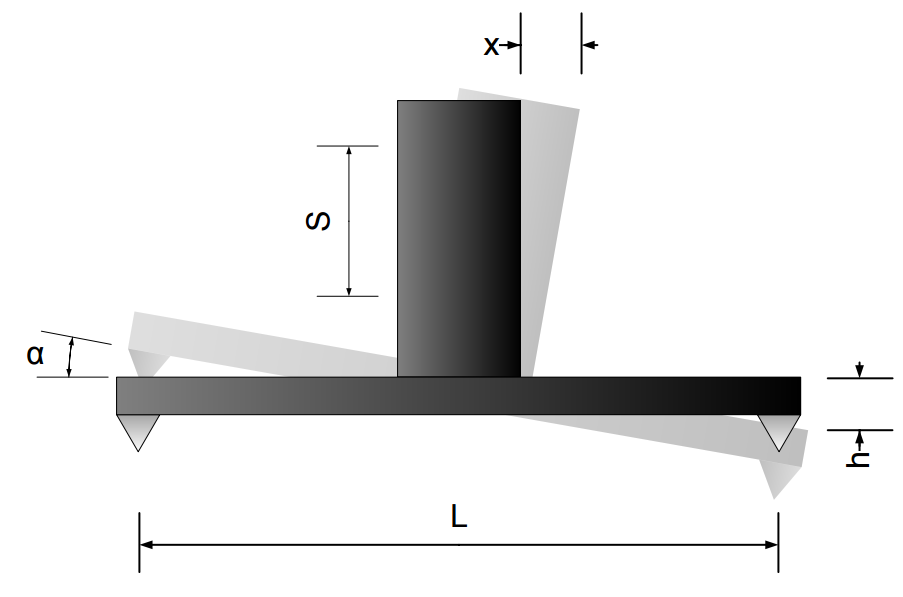
L –طول القاعدة;
المسافة بين الحزم على عناصر IK1 و RK1 ؛
x – المسافة التي تم قياسها بواسطة رأس الليزر
α – الدوران الزاوي لعنصر RK1
h – فرق الارتفاع بين نقطتي قياس
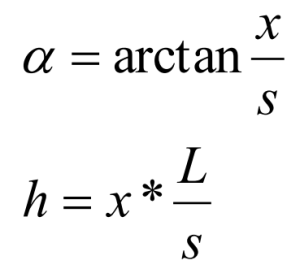
يقيس رأس الليزر المعلمة x بينما يجب تعيين المسافة بين الحزم s وطول القاعدة L في معلمات برنامج HPI. ثم يمكن حساب زاوية الدوران α والحركة في الاتجاه العمودي h من:
ملاحظات التطبيقات
يمكن استخدام البصريات الزاوية من أجل:
قياس الانحراف أو الانعراج في الآلة
قياس استقامة سرير الآلة
قياس الزوايا الصغيرة
قياس الانحراف أو الانعراج للآلة واستقامة سرير الآلة
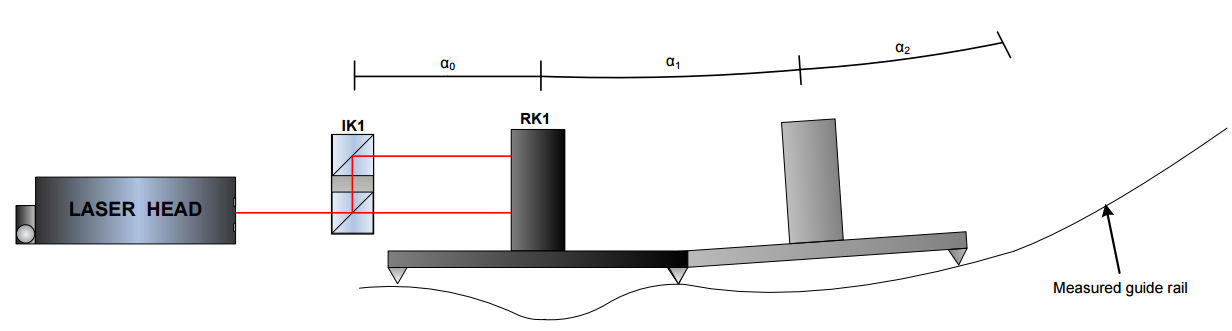 يظهر شرح التطبيقين الأولين في الشكل أدناه. يتم ترجمة RK1 المركب على عربة فوق سكة التوجيه المقاسة. يتم إجراء قياس لكل طول للعربة (عادة 100 مم). ثم تُستخدم الصيغ من الفصل السابق لحساب الزوايا (لقياسات الانحراف / الانعراج) أو الترجمات الرأسية (لقياسات الاستقامة).
يظهر شرح التطبيقين الأولين في الشكل أدناه. يتم ترجمة RK1 المركب على عربة فوق سكة التوجيه المقاسة. يتم إجراء قياس لكل طول للعربة (عادة 100 مم). ثم تُستخدم الصيغ من الفصل السابق لحساب الزوايا (لقياسات الانحراف / الانعراج) أو الترجمات الرأسية (لقياسات الاستقامة).
تجدر الإشارة إلى أن طريقة قياس الاستقامة هذه تتطلب الاختيار المناسب لنقاط القياس. يؤدي اختيار النقاط الأكثر كثافة من حجم النقل إلى قيم مفرطة لأخطاء الاستقامة (شكل الخطأ مناسب).
قد يؤثر اختيار النقاط المتفرقة للغاية على كل من شكل وقيمة الخطأ كما هو موضح في الشكل أدناه. في هذه الحالة الخاصة بسبب نقاط القياس المتناثرة جدًا ، لن يلاحظ الليزر التغيير في شكل قضيب التوجيه – لن تتغير المسافة المقاسة بين الحزم!
قياس الزوايا الصغيرة
يسمح قياس الزوايا الصغيرة بقياسات دقيقة للغاية للدورات الصغيرة إذا تم استيفاء شرطين:
1. الزاوية المقاسة في حدود ± 5 درجات
2. لا تتغير المسافة بين RK1 ورأس الليزر أكثر من بضعة سنتيمترات.
 يأتي القيد الثاني من التأثير المتغاير الموجود في ليزر HPI-3D. يؤثر هذا التأثير على الزاوية وفقًا لـ ( Δl هو تغيير المسافة بين الليزر و RK1 أثناء القياسات)
يأتي القيد الثاني من التأثير المتغاير الموجود في ليزر HPI-3D. يؤثر هذا التأثير على الزاوية وفقًا لـ ( Δl هو تغيير المسافة بين الليزر و RK1 أثناء القياسات)
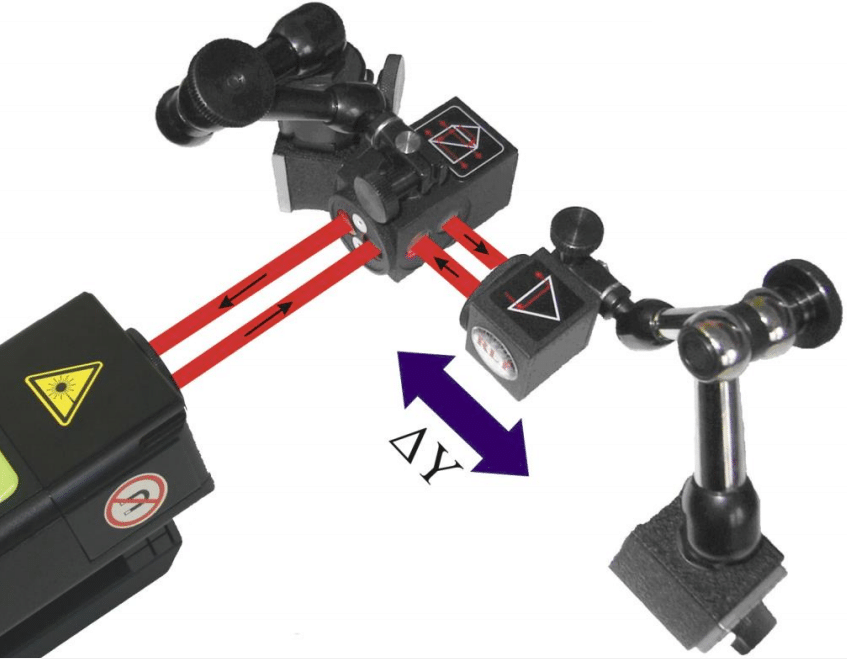
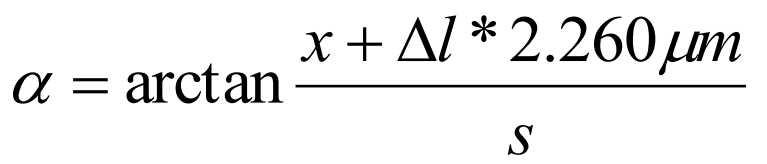
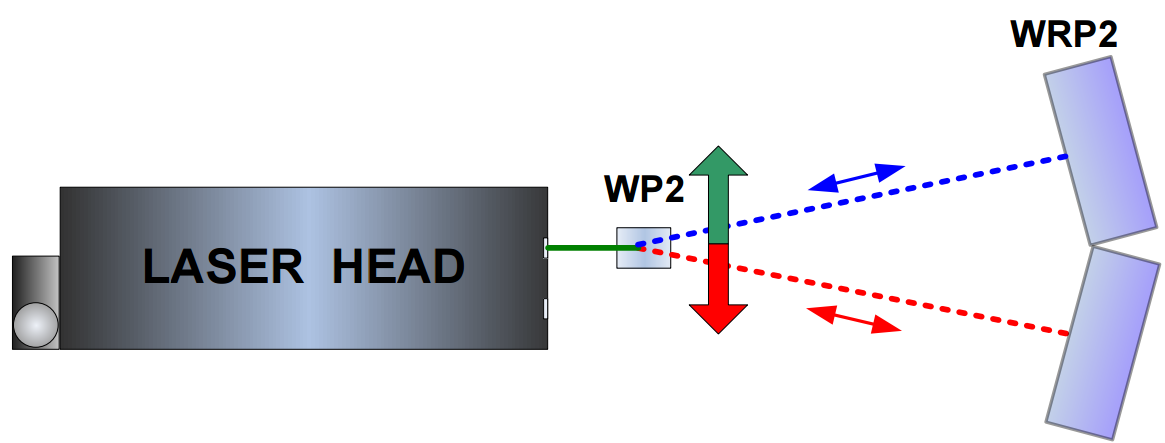
 تتطلب طريقة أخرى لقياس الاستقامة والتوازي والتربيع باستخدام مقياس التداخل الليزري استخدام بصريات من نوع ولاستون. تتكون البصريات من عنصرين: منشور استقطاب ولاستون WP2 وعاكس مزدوج WRP2 – انظر الشكل أدناه. يتم تقسيم شعاع الليزر ، المكون من قطبين عموديين ، بواسطة عنصر WP2 إلى حزمتين. تغادر الحزم WP2 بزاوية معينة وبعد ذلك ، بعد انعكاسها مرة أخرى بواسطة العاكس WRP2 ، تعود إلى رأس الليزر. يقيس الليزر الفرق بين أطوال مسارات الأشعة.
تتطلب طريقة أخرى لقياس الاستقامة والتوازي والتربيع باستخدام مقياس التداخل الليزري استخدام بصريات من نوع ولاستون. تتكون البصريات من عنصرين: منشور استقطاب ولاستون WP2 وعاكس مزدوج WRP2 – انظر الشكل أدناه. يتم تقسيم شعاع الليزر ، المكون من قطبين عموديين ، بواسطة عنصر WP2 إلى حزمتين. تغادر الحزم WP2 بزاوية معينة وبعد ذلك ، بعد انعكاسها مرة أخرى بواسطة العاكس WRP2 ، تعود إلى رأس الليزر. يقيس الليزر الفرق بين أطوال مسارات الأشعة.
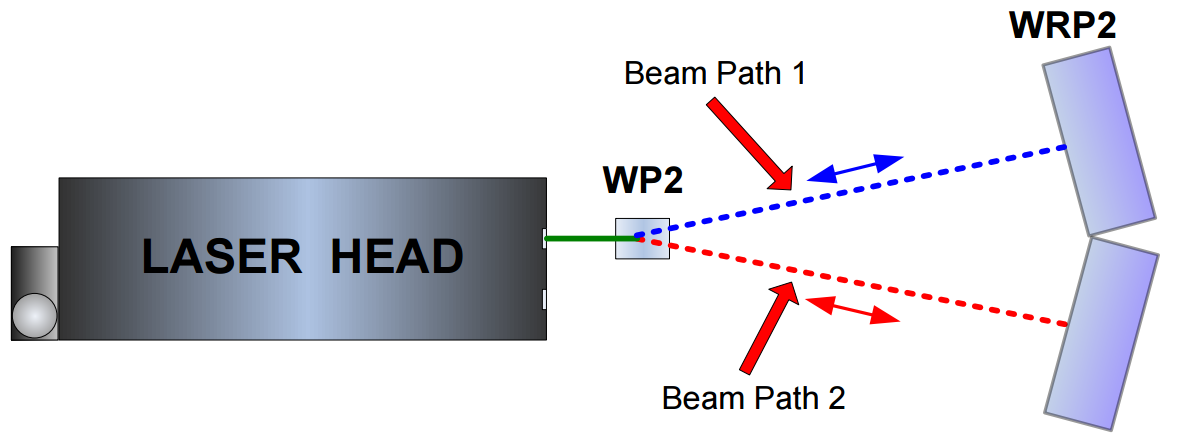
يظهر في الشكل 7.11 شرحًا لعمل عنصر WP2. يتكون هذا المنشور من اثنين من المنشورات المثلثية ثنائية الأضلاع والتي تم تثبيتها معًا. تم بناء كلا المنشورين من نفس المادة ولكن محوريهما العاديين وغير العاديين متعامدين مع بعضهما البعض ، أي معامل الانكسار للمحور العادي للمنشور الأيسر Nol يساوي قيمة المعامل للمحور الاستثنائي للمنشور الأيمن Ner.
وبسبب هذا ، فإن أشعة الليزر المستقطبة المتعامدة التي تدخل عنصر ولاستون تنحرف بزوايا مختلفة على الطبقة الحدودية الوسطى وعلى الطبقة الحدودية اليمنى. يمكن إثبات هذا السلوك بسهولة باستخدام قانون سنيل. غالبًا ما يُشار إلى الزاوية بين الحزم الخارجة على أنها Θ.
 على عكس البصريات الزاوية ، تتغير المسافة بين الحزم مع المسافة ، مما يجعل بناء العنصر العاكس صعبًا. في الأشكال أدناه ، يظهر بناء عنصر الانعكاس لبصريات ولاستون WRP2. يتكون من اثنين من المنشورات الزجاجية الخاصة الملصقة بدقة شديدة بزاوية Θ-180 درجة. تعكس المناشير المستخدمة في WRP2 في المحور Y الشعاع بترجمة ½ (مثل العاكس الرجعي RL1). في المحور X ، تنعكس الشعاع بدون ترجمة (كما هو الحال في المرآة).
على عكس البصريات الزاوية ، تتغير المسافة بين الحزم مع المسافة ، مما يجعل بناء العنصر العاكس صعبًا. في الأشكال أدناه ، يظهر بناء عنصر الانعكاس لبصريات ولاستون WRP2. يتكون من اثنين من المنشورات الزجاجية الخاصة الملصقة بدقة شديدة بزاوية Θ-180 درجة. تعكس المناشير المستخدمة في WRP2 في المحور Y الشعاع بترجمة ½ (مثل العاكس الرجعي RL1). في المحور X ، تنعكس الشعاع بدون ترجمة (كما هو الحال في المرآة).

رأس الليزر مع بصريات ولاستون حساس للحركات الزاوية للعاكس!
 يتيح استخدام بصريات ولاستون قياس الحركة النسبية لعنصر WP2 في المحور العمودي على شعاع الليزر. كما هو مبين في الشكل أدناه ، فإن القياسات ممكنة فقط مع حركة WP2.
يتيح استخدام بصريات ولاستون قياس الحركة النسبية لعنصر WP2 في المحور العمودي على شعاع الليزر. كما هو مبين في الشكل أدناه ، فإن القياسات ممكنة فقط مع حركة WP2.
نظرًا لحساسية قراءات الليزر على الحركة الزاوية لـ WRP2 ، من المهم ألا يتم لمس عنصر WRP2 أو تحريكه أثناء القياسات.
ملاحظات التطبيقات
على الرغم من أنه من الممكن قياس الاستقامة إما بحركة عنصر WP2 أو WRP2 إلا أن هناك اختلافات معينة. يجب أن يكون هذا العنصر WRP2 ثابتًا أثناء القياس (أي لا ينبغي تحريكه على طول شعاع الليزر). نظرًا لأن WRP2 يتصرف في أحد المحاور مثل المرآة ، فإن أي حركة زاوية لـ WRP2 في هذا المحور قد تؤدي إلى عدم عودة شعاع الليزر إلى رأس الليزر وسيؤثر بشكل كبير على نتائج القياس!
لا توجد مثل هذه المشاكل عندما يتم نقل WP2 بدلا من ذلك. العيب الوحيد هو نطاق القياس الأصغر. يمكن نقل WP2 بمقدار ± 2 مم بينما يبلغ الحد الأقصى لنطاق القياس لـ WRP2 ± 30 مم (ولكن فقط عندما تكون المسافة بين WP2 و WRP2 في 4.5 م).
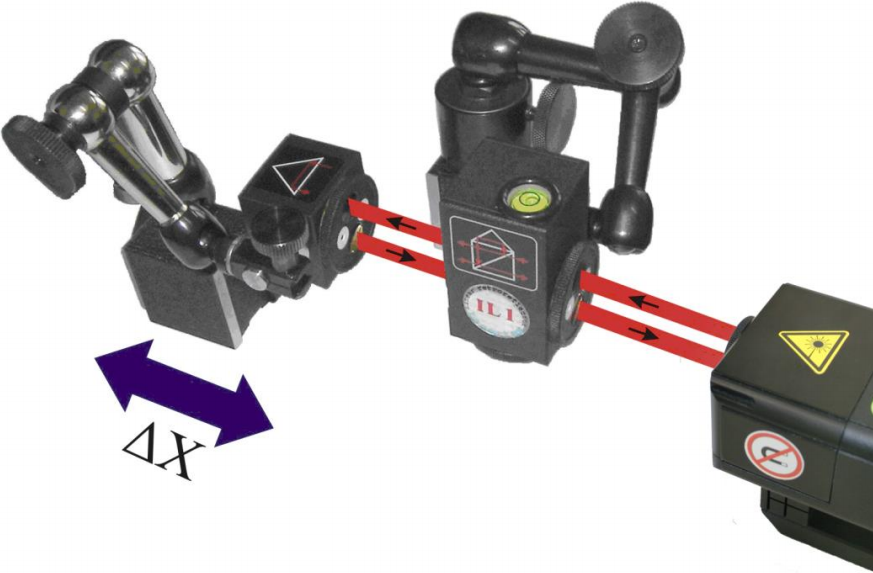
 إن رأس الليزر HPI-3D قادر على اكتشاف موضع الحزمة العائدة. يتغير موضع الحزمة العائدة مع حركة العاكس الرجعي RL1 عموديًا على محور شعاع الليزر. تظهر هذه الظاهرة لمحور واحد في الشكل أدناه. يتم التعامل مع الحزمة العائدة من مقياس التداخل الخطي IL1 كمرجع بينما تعكس الحزمة RL1 كحزمة قياس. يسجل الليزر في وقت واحد معلومات حول التغيرات في موضع المكون البصري في كلا المحورين عموديًا على شعاع الليزر.
إن رأس الليزر HPI-3D قادر على اكتشاف موضع الحزمة العائدة. يتغير موضع الحزمة العائدة مع حركة العاكس الرجعي RL1 عموديًا على محور شعاع الليزر. تظهر هذه الظاهرة لمحور واحد في الشكل أدناه. يتم التعامل مع الحزمة العائدة من مقياس التداخل الخطي IL1 كمرجع بينما تعكس الحزمة RL1 كحزمة قياس. يسجل الليزر في وقت واحد معلومات حول التغيرات في موضع المكون البصري في كلا المحورين عموديًا على شعاع الليزر.
ثم يتم استخدام الموضع المقاس إما للتحكم الدقيق في محاذاة مسار شعاع الليزر أو لقياسات الاستقامة أو التربيع أو التوازي. يُرجع القياس ثلاثي الأبعاد القيم المطلقة لموضع الشعاع. هذا يختلف عن المحور الرئيسي لقياس التداخل حيث تكون النتائج المتحصل عليها تدريجية.
ملاحظات التطبيقات
يمكن استخدام الخيار ثلاثي الأبعاد للتقدير السريع للاستقامة في وقت واحد على محورين ولكن مع بعض القيود الناتجة عن الطبيعة الفيزيائية للقياسات.
على عكس جميع قياسات التداخل ، يلعب رأس الليزر دورًا نشطًا في القياسات ، أي أن موضعه واهتزازاته تؤثر على نتائج القياس. لهذا السبب ، من المهم تجنب استخدام الحامل ثلاثي القوائم وإصلاح رأس الليزر مباشرة على الجهاز المقاس.
يعتمد القياس ثلاثي الأبعاد على موضع الحزمة العائدة على الجهاز الحساس للموضع. وبالتالي من المهم أن تظل الحزمة ضمن نطاق قياس الجهاز ، أي ± 1 مم. قد يؤدي استخدام الخيار ثلاثي الأبعاد خارج هذا النطاق إلى نتائج غير موثوقة.
على غرار جميع قياسات الاستقامة القائمة على الليزر ، تؤثر اضطرابات الهواء على النتائج. يمكن استيعاب التجوال الصغير لشعاع الليزر بواسطة دائرة معالجة الإشارات داخل الليزر مع تغيير متوسط الوقت (انظر وصف البرنامج لمزيد من التفاصيل). إذا كانت حركات الهواء كبيرة جدًا – أي عند عودة الشعاع إلى الليزر وتجول خارج نافذة ± 1 مم – فقد تصبح نتائج القياسات ثلاثية الأبعاد غير قابلة للاستخدام. في مثل هذه الحالة ، يجب استخدام بعض الحماية من حركة الهواء أو استخدام مروحة تجبر حركة الهواء. تعتبر مشكلة الاضطرابات الهوائية أكثر إزعاجًا للمسافات الأكبر بين رأس الليزر وعنصر RL1.