Угловой метод
Метод Волластона
3D-метод
Угловой метод
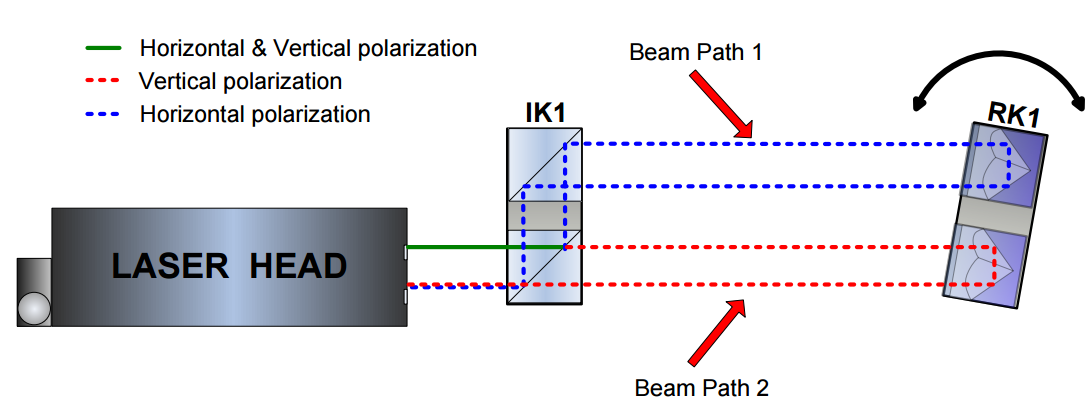 Работа HPI-3D с используемой угловой оптикой показана на рисунке ниже. Лазер выдает лазерный луч, состоящий из двух поляризаций: горизонтальной (H) и вертикальной (V). Это возможно, потому что светоделитель внутри IK1 установлен под углом Брюстера. Оба луча направлены на путь измерения, но смещены параллельно на расстояние 1 ’’ или 2 ’’ (в зависимости от версии).
Работа HPI-3D с используемой угловой оптикой показана на рисунке ниже. Лазер выдает лазерный луч, состоящий из двух поляризаций: горизонтальной (H) и вертикальной (V). Это возможно, потому что светоделитель внутри IK1 установлен под углом Брюстера. Оба луча направлены на путь измерения, но смещены параллельно на расстояние 1 ’’ или 2 ’’ (в зависимости от версии).
Когда расстояние между оптическими элементами изменяется, частота обоих лучей изменяется в соответствии с эффектом Доплера. Лазерная головка замечает движение только в том случае, если есть вращение IK1 по сравнению с RK1, то есть когда есть разница в длинах путей луча. Затем измеренное расстояние можно использовать для определения угла поворота (тангажа или рыскания машины) или вертикального перемещения оптического компонента (IK1 или RK1).
Лазерная головка с угловой оптикой нечувствительна к линейным движениям.
На рисунке справа схематично показан RK1 на тележке со всеми параметрами, важными для расчета. Для наглядности позиция IK1 трактуется как ориентир. Значение параметров: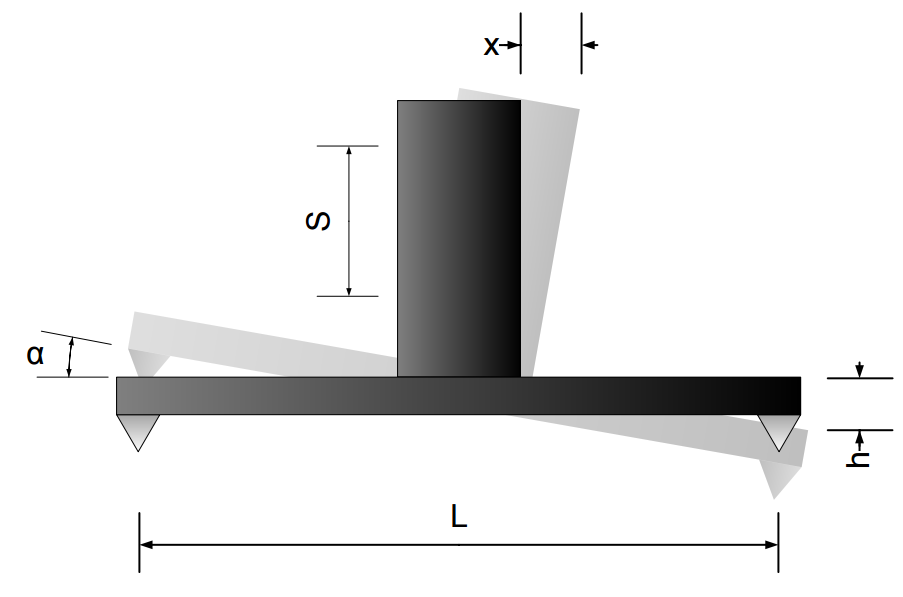
L – длина базы;
s – расстояние между лучами на элементах IK1 и RK1;
x – расстояние, измеренное лазерной головкой
α – угловой поворот элемента RK1
h – разница в высоте между двумя точками измерения
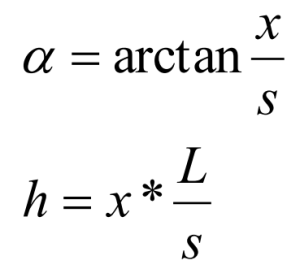
Лазерная головка измеряет параметр x, в то время как расстояние между лучами s и длина основания L должны быть установлены в параметрах программного обеспечения HPI. Тогда угол поворота α и перемещение в вертикальном направлении h можно рассчитать по формуле:
Примечания к применению
- Угловая оптика может использоваться для:
- Измерение тангажа или рыскания машины
- Измерение прямолинейности станины станка
- Измерение малых углов
Измерение тангажа или рыскания машины и прямолинейности станины машины
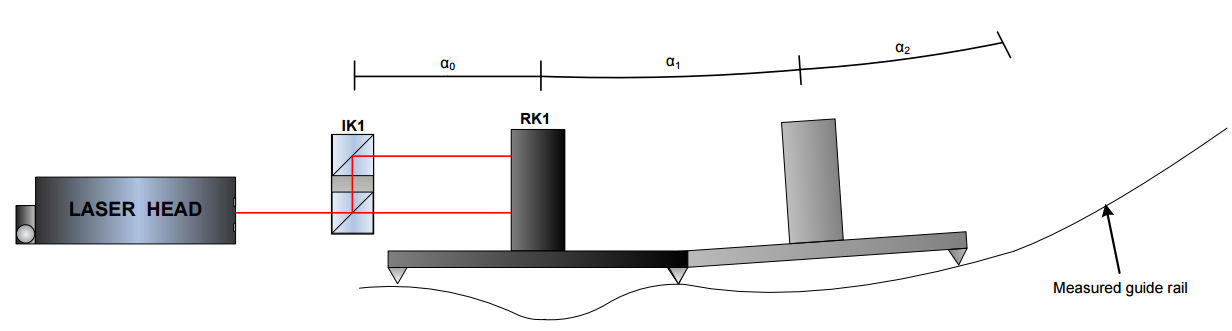 Описание первых двух приложений показано на рисунке ниже. RK1, установленный на каретке, перемещается по измеренной направляющей. Измеряется каждая длина каретки (обычно 100 мм). Формулы из предыдущей главы затем используются для расчета углов (для измерений по тангажу / рысканью) или вертикальных перемещений (для измерений прямолинейности).
Описание первых двух приложений показано на рисунке ниже. RK1, установленный на каретке, перемещается по измеренной направляющей. Измеряется каждая длина каретки (обычно 100 мм). Формулы из предыдущей главы затем используются для расчета углов (для измерений по тангажу / рысканью) или вертикальных перемещений (для измерений прямолинейности).
Стоит отметить, что такой метод измерения прямолинейности требует правильного выбора точек измерения.Выбор точек плотнее размера каретки приводит к завышенным значениям ошибок прямолинейности (форма ошибки правильная).
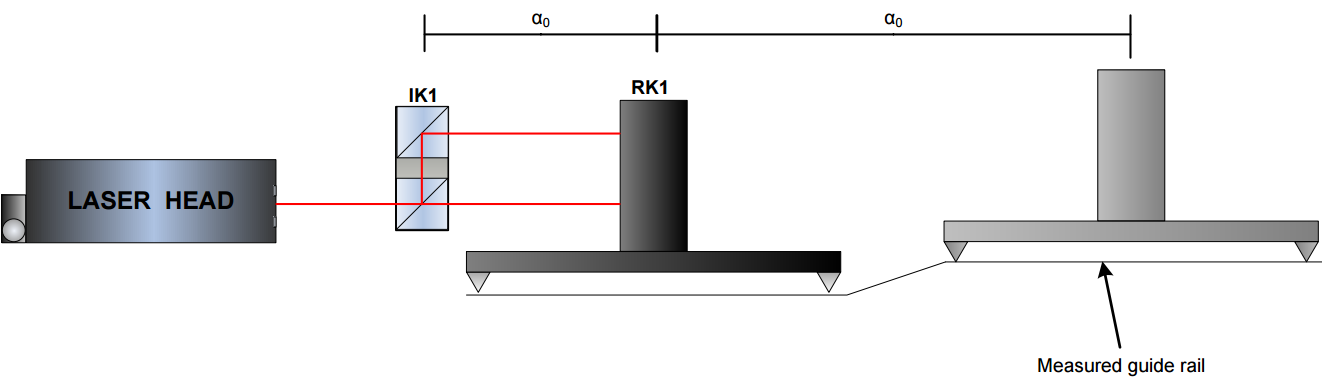
Выбор слишком разреженных точек может повлиять как на форму, так и на величину ошибки, как показано на рисунке. В этом особом случае из-за слишком малого количества точек измерения лазер не заметит изменения формы направляющей – измеренное расстояние между лучами не изменится!
Измерение малых углов
Измерение малых углов позволяет очень точно измерять небольшие повороты при соблюдении двух условий:
- измеренный угол в пределах ± 5 градусов
- расстояние между RK1 и лазерной головкой не изменяется более чем на несколько сантиметров.
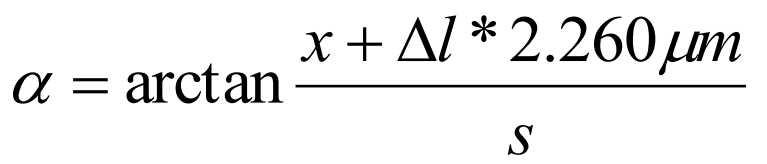 Второе ограничение связано с гетеродинным эффектом, присутствующим в лазере HPI-3D. Этот эффект влияет на угол согласно (Δl – изменение расстояния между лазером и RK1 во время измерений):
Второе ограничение связано с гетеродинным эффектом, присутствующим в лазере HPI-3D. Этот эффект влияет на угол согласно (Δl – изменение расстояния между лазером и RK1 во время измерений):
Метод Волластона
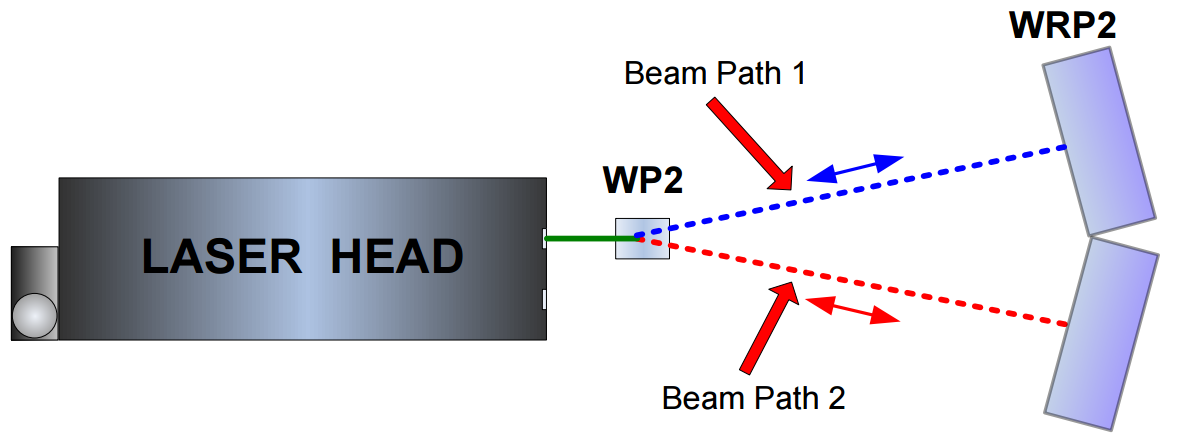 Другой способ измерения прямолинейности, параллельности и прямоугольности с помощью лазерного интерферометра требует использования оптики типа Волластона. Оптика состоит из двух элементов: поляризационной призмы Волластона WP2 и парного отражателя WRP2 – см. Рисунок. Лазерный луч, состоящий из двух перпендикулярных поляризаций, разделяется элементом WP2 на два луча. Лучи выходят из WP2 под определенным углом, а затем, после отражения от отражателя WRP2, возвращаются в лазерную головку.Лазер измеряет разницу между длинами путей лучей.
Другой способ измерения прямолинейности, параллельности и прямоугольности с помощью лазерного интерферометра требует использования оптики типа Волластона. Оптика состоит из двух элементов: поляризационной призмы Волластона WP2 и парного отражателя WRP2 – см. Рисунок. Лазерный луч, состоящий из двух перпендикулярных поляризаций, разделяется элементом WP2 на два луча. Лучи выходят из WP2 под определенным углом, а затем, после отражения от отражателя WRP2, возвращаются в лазерную головку.Лазер измеряет разницу между длинами путей лучей.
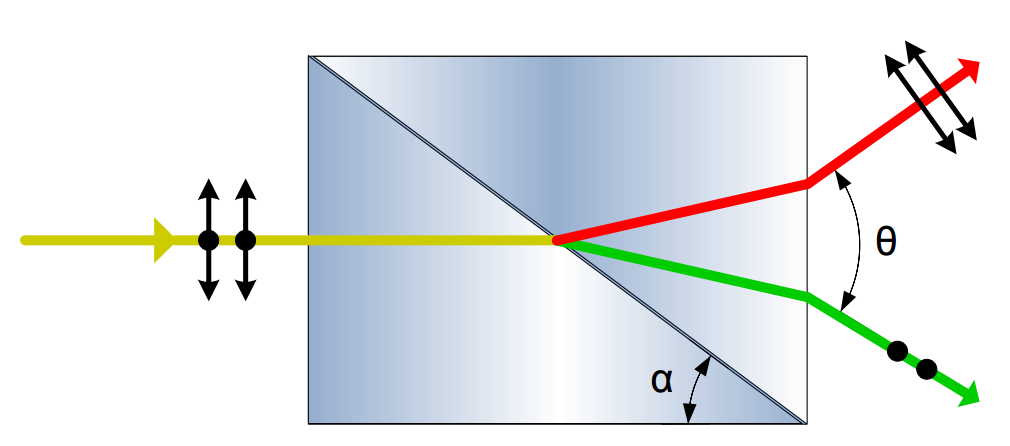
На рисунке показано объяснение работы элемента WP2. Эта призма состоит из двух склеенных вместе двулучепреломляющих треугольных призм. Обе призмы изготовлены из одного материала, но их обыкновенная и необычная оси перпендикулярны друг другу, т.е. коэффициент преломления обыкновенной оси левой призмы nol равен значению коэффициента необычной оси правой призмы.
Из-за этого ортогонально поляризованные лазерные лучи, входящие в элемент Волластона, отклоняются под разными углами на средний пограничный слой и на правый пограничный слой. Такое поведение легко доказать с помощью закона Снеллиуса. Угол между выходящими лучами часто обозначается как Θ.
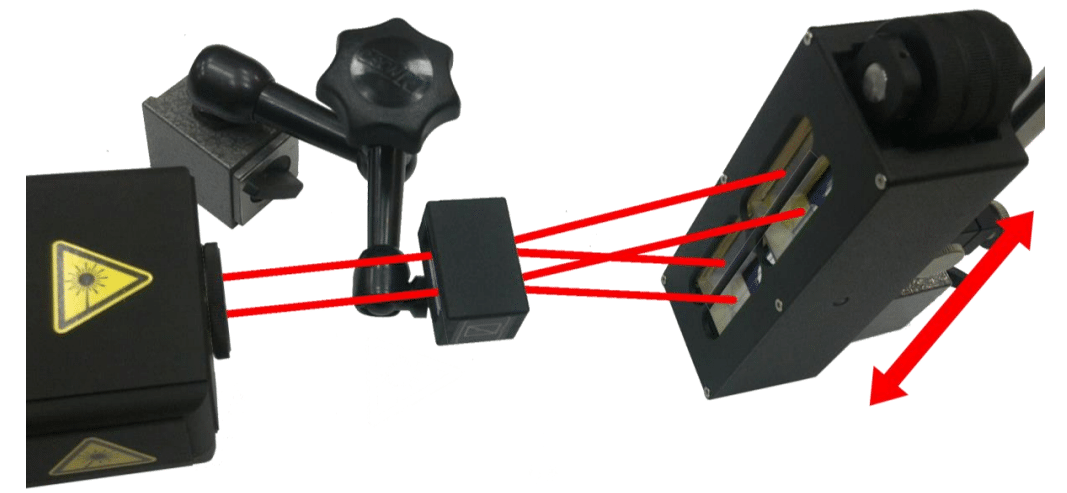
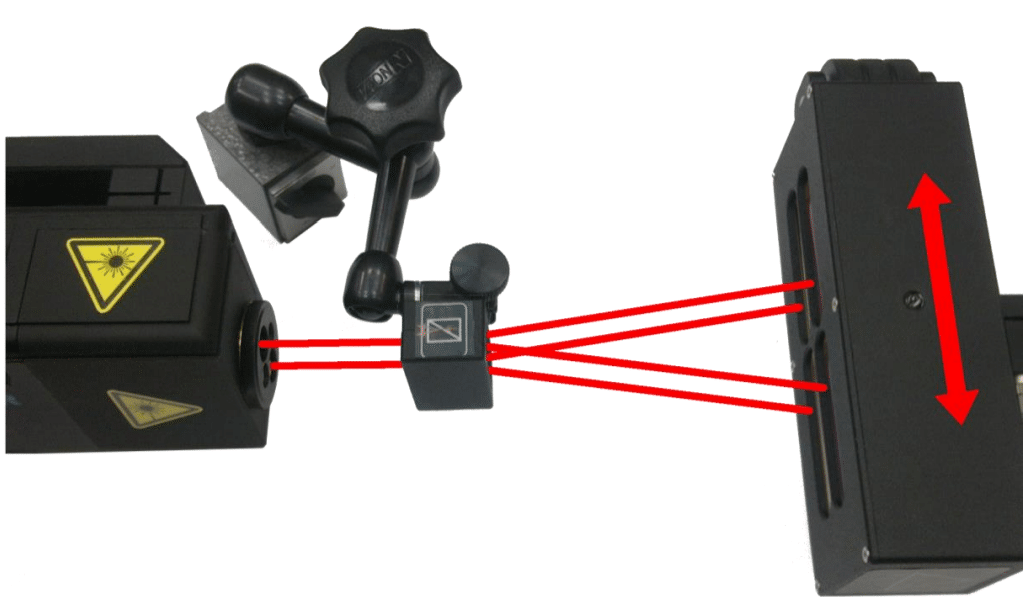
 В отличие от угловой оптики расстояние между лучами меняется с увеличением расстояния, что затрудняет конструкцию отражающего элемента. На рисунках ниже показана конструкция отражающего элемента для оптики Wollaston WRP2. Он состоит из двух специальных стеклянных призм, очень точно склеенных под углом 180 Θ.Призмы, используемые в WRP2 по оси y, отражают луч с перемещением ½ ’’ (как ретрорефлектор RL1). По оси x луч отражается без трансляции (как в зеркале).
В отличие от угловой оптики расстояние между лучами меняется с увеличением расстояния, что затрудняет конструкцию отражающего элемента. На рисунках ниже показана конструкция отражающего элемента для оптики Wollaston WRP2. Он состоит из двух специальных стеклянных призм, очень точно склеенных под углом 180 Θ.Призмы, используемые в WRP2 по оси y, отражают луч с перемещением ½ ’’ (как ретрорефлектор RL1). По оси x луч отражается без трансляции (как в зеркале).

Лазерная головка с оптикой Wollaston чувствительна к угловым перемещениям рефлектора!
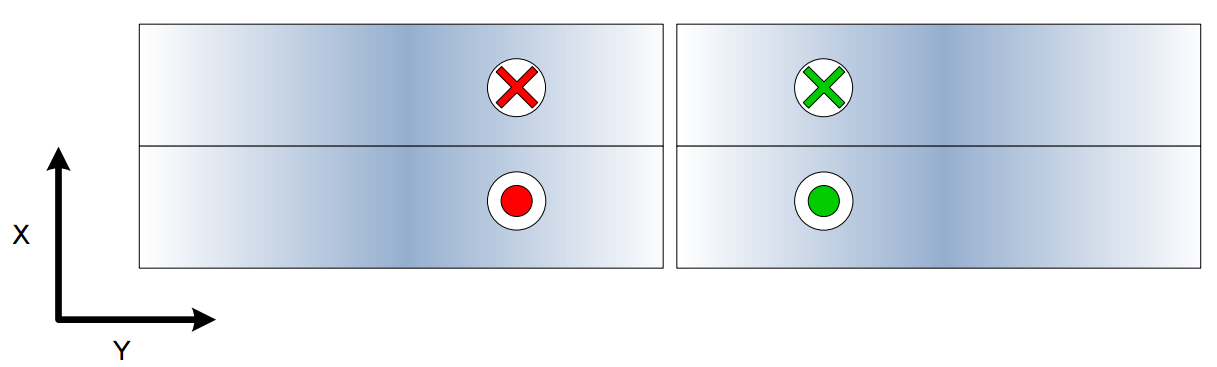
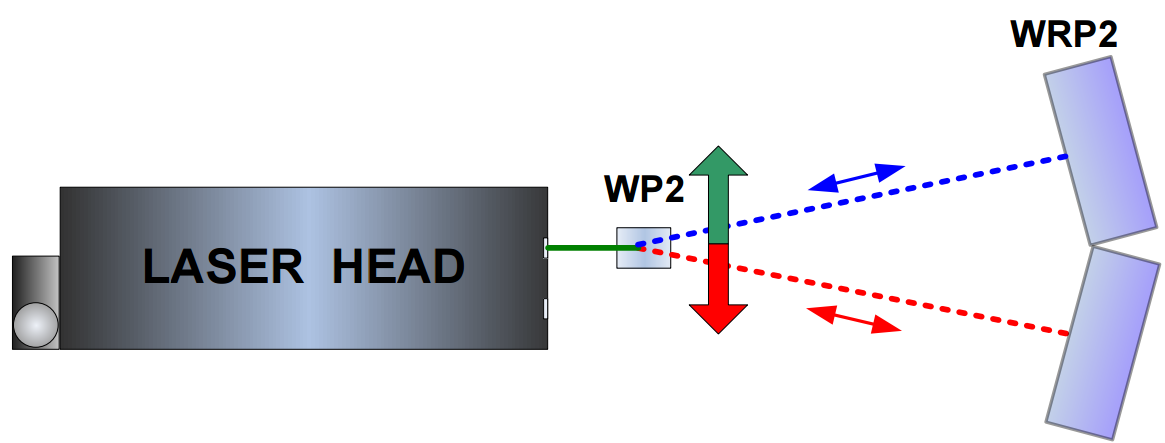 Использование оптики Wollaston позволяет измерять относительное перемещение элемента WP2 по оси, перпендикулярной лазерному лучу. Как показано на рисунке ниже, измерения возможны ТОЛЬКО с призмой WP2.
Использование оптики Wollaston позволяет измерять относительное перемещение элемента WP2 по оси, перпендикулярной лазерному лучу. Как показано на рисунке ниже, измерения возможны ТОЛЬКО с призмой WP2.
Из-за чувствительности показаний лазера к угловому перемещению WRP2 важно, чтобы во время измерений элемент WRP2 не касался и не перемещался.
Примечания к применению
Хотя можно измерить прямолинейность по перемещению элемента WP2 или WRP2, но есть определенные различия. В WRP2 этот элемент должен быть неподвижен во время измерения (т.е. не должен перемещаться по лазерному лучу). Поскольку WRP2 ведет себя на одной из осей как зеркало, любое угловое перемещение WRP2 по этой оси может привести к тому, что лазерный луч не вернется к лазерной головке, и существенно повлияет на результаты измерения!
При перемещении WP2 таких проблем не возникает. Единственный недостаток – меньший диапазон измерения. WP2 можно перемещать на ± 2 мм, в то время как максимальный диапазон измерения WRP2 составляет ± 30 мм (но только когда расстояние между WP2 и WRP2 составляет 4,5 м).
3D-метод
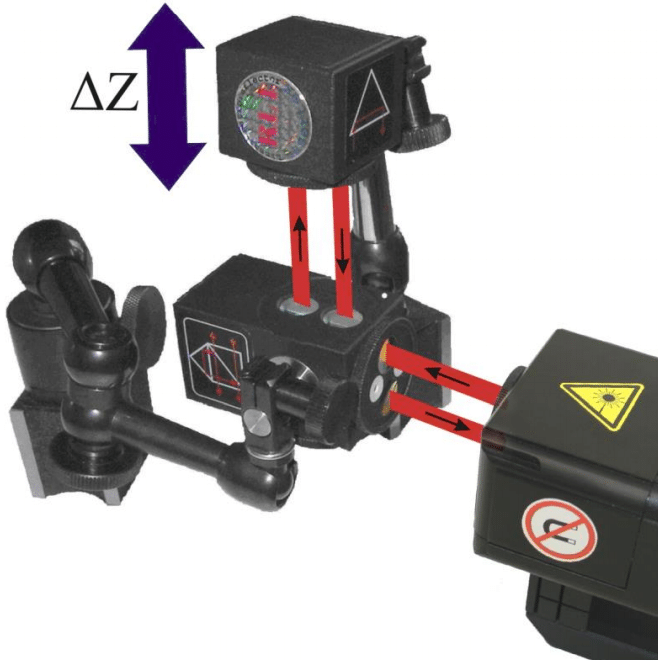
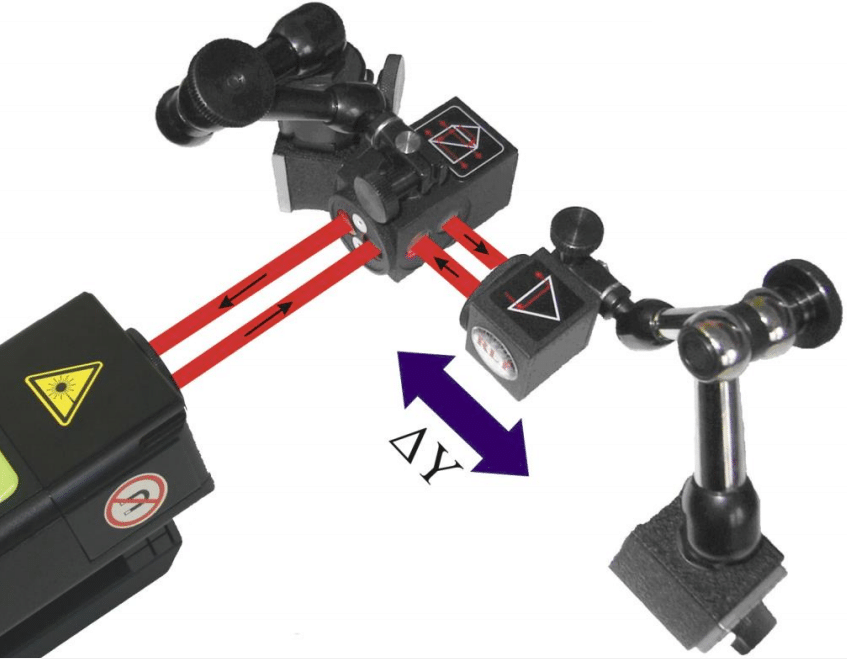
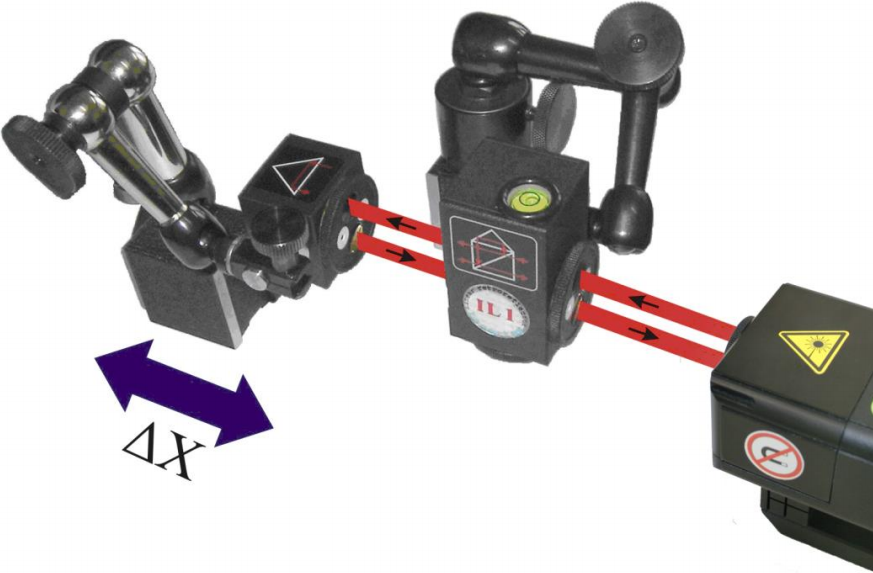
 Лазерная головка HPI-3D способна определять положение возвращающегося луча. Положение обратного луча изменяется при перемещении ретрорефлектора RL1 перпендикулярно оси лазерного луча. Это явление для одной оси показано на рисунке ниже. Луч, возвращающийся от линейного интерферометра IL1, рассматривается как эталон, а луч, отраженный RL1, – как измерительный. Лазер одновременно регистрирует информацию об изменении положения оптического компонента по обеим осям, перпендикулярным лазерному лучу.
Лазерная головка HPI-3D способна определять положение возвращающегося луча. Положение обратного луча изменяется при перемещении ретрорефлектора RL1 перпендикулярно оси лазерного луча. Это явление для одной оси показано на рисунке ниже. Луч, возвращающийся от линейного интерферометра IL1, рассматривается как эталон, а луч, отраженный RL1, – как измерительный. Лазер одновременно регистрирует информацию об изменении положения оптического компонента по обеим осям, перпендикулярным лазерному лучу.
Затем измеренное положение используется либо для точного контроля выравнивания траектории лазерного луча, либо для измерений прямолинейности, прямоугольности или параллельности. Трехмерное измерение возвращает абсолютные значения положения луча. Это отличается от основной, интерферометрической оси измерения, где полученные результаты являются инкрементальными.
Примечания к применению
Опцию 3D можно использовать для быстрой оценки прямолинейности одновременно по двум осям, но с некоторыми ограничениями, обусловленными физической природой измерений.
В отличие от всех интерферометрических измерений, лазерная головка принимает активное участие в измерениях, т.е. ее положение и ее колебания влияют на результаты измерения. По этой причине важно избегать использования штатива и фиксировать лазерную головку непосредственно на измеряемом станке.
Трехмерное измерение основывается на положении возвратного луча на позиционно-чувствительном устройстве. Таким образом, важно, чтобы луч оставался в пределах диапазона измерения устройства, т.е. ± 1 мм. Использование опции 3D за пределами этого диапазона приведет к ненадежным результатам.
Как и во всех лазерных измерениях прямолинейности, турбулентность воздуха влияет на результаты. Небольшое рысканье лазерного луча может быть компенсировано схемой обработки сигнала внутри лазера с изменением времени усреднения (подробнее см. Описание программного обеспечения). Если движение воздуха слишком велико, то есть когда луч, возвращающийся к лазеру, выходит за пределы окна ± 1 мм, то результаты трехмерных измерений могут стать непригодными для использования. В такой ситуации необходимо использовать либо экранирование от движения воздуха, либо вентилятор, нагнетающий движение воздуха. Проблема с турбулентностью воздуха более серьезна при больших расстояниях между лазерной головкой и элементом RL1.