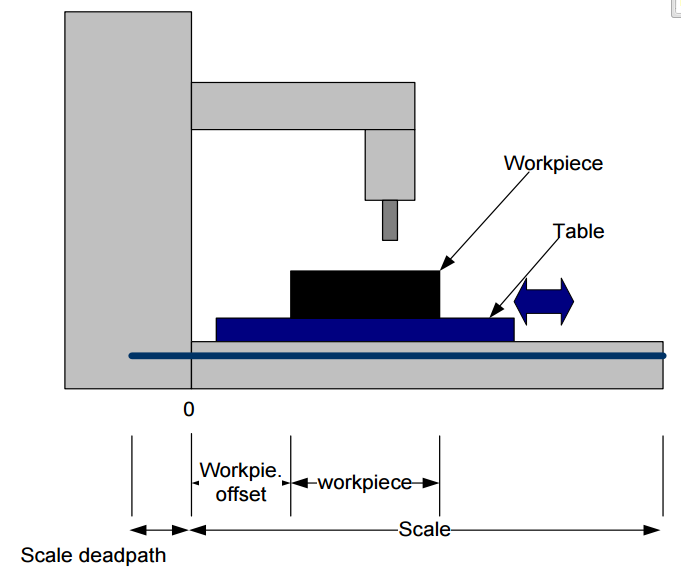
Расстояние L, измеренное в линейной конфигурации, существенно зависит от фактической длины волны лазерного луча по формуле
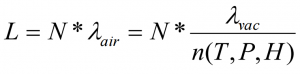
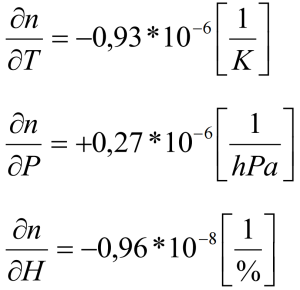
,где N обозначает количество интерференционных полос, ![]() – длина волны лазера, измеренная в вакууме, а n (T, P, H) – коэффициент преломления воздуха. Длина волны меняется при колебаниях параметров воздуха: влажности, давления и влажности. Из экспериментальных формул можно получить зависимости коэффициента преломления от T, P и H в обычных условиях (T = 293K, P = 1000 гПа, H = 50%):
– длина волны лазера, измеренная в вакууме, а n (T, P, H) – коэффициент преломления воздуха. Длина волны меняется при колебаниях параметров воздуха: влажности, давления и влажности. Из экспериментальных формул можно получить зависимости коэффициента преломления от T, P и H в обычных условиях (T = 293K, P = 1000 гПа, H = 50%):
Изменения длины волны автоматически компенсируются лазерной головкой HPI-3D только в том случае, если датчик TH используется правильно, то есть размещен рядом с траекторией лазерного луча. Давление воздуха измеряется внутри лазерной головки.