The distance L measured in the linear configuration depends significantly on the actual wavelength lair of the laser beam with the formula
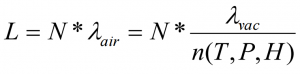
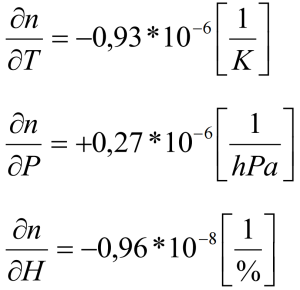
,where N denotes the number of interference fringes, ![]() is the laser wavelength measured in vacuum and n(T,P,H) is the refraction coefficient of the air. The wavelength changes with the fluctuations of the parameters of the air: humidity, pressure and humidity. From the experimental formulas it may be obtained the refraction coefficient dependences on T, P and H in usual conditions (T=293K, P=1000hPa, H=50%):
is the laser wavelength measured in vacuum and n(T,P,H) is the refraction coefficient of the air. The wavelength changes with the fluctuations of the parameters of the air: humidity, pressure and humidity. From the experimental formulas it may be obtained the refraction coefficient dependences on T, P and H in usual conditions (T=293K, P=1000hPa, H=50%):
The changes of the wavelength are compensated automatically by the HPI-3D laser head only if the TH sensor is used properly, i.e. placed near the laser beam path. The air pressure is measured inside the laser head.