إن أهم مصدر للأخطاء في قياسات هندسة الماكينة هو درجة حرارة الآلة المقاسة (أو بشكل أكثر دقة ، تغير درجة الحرارة). على سبيل المثال ، إذا كانت قاعدة الماكينة مصنوعة من الفولاذ ، فإن طول القاعدة يزيد بمقدار 11.7um عندما تتغير درجة حرارتها بمقدار 1 كيلفن. يوضح مدى أهمية القياسات الدقيقة جدًا لقياس درجة حرارة الجزء المتحكم فيه من الجهاز واستخدامه في تصحيحات القراءة. هذه ليست مهمة بسيطة لعدة أسباب ، ولكن أهمها أنه عندما تعمل الآلة ، توجد تدرجات حرارة عليها. وهذا يعني أنه يلزم وجود أكثر من مستشعر درجة حرارة واحد وأنه كلما تم استخدام المزيد من أجهزة الاستشعار ، يمكن تحقيق دقة أفضل. علاوة على ذلك ، قد “يمتص” شكل الجزء المقاس من الآلة جزءًا من تمدد المادة أو قد يتم بناء الجزء من مواد ذات قابلية توسع مختلفة. كما ذكرنا هنا ، تؤثر درجة الحرارة على الدقة أيضًا لأنها تغير معامل الانكسار للوسط الذي يتم إجراء القياسات فيه (عادة ما يكون الهواء ، ولكن قد يكون الماء على سبيل المثال). تم تقديم معادلة Edlen توضح كيف يتغير معامل الانكسار للهواء مع تغير درجة حرارة الهواء والضغط والرطوبة. الأخطاء الناتجة عن تغيير الطول الموجي أقل أهمية من المذكورة أعلاه ، لكن لا يمكن التخلي عنها. تقريبًا ، خطأ 1 ppm (أي 1um / m) ناتج عن: تغير درجة حرارة الهواء بمقدار 1K ، وتغير ضغط الهواء بمقدار 4hPa وتغير رطوبة الهواء بنسبة 30٪.
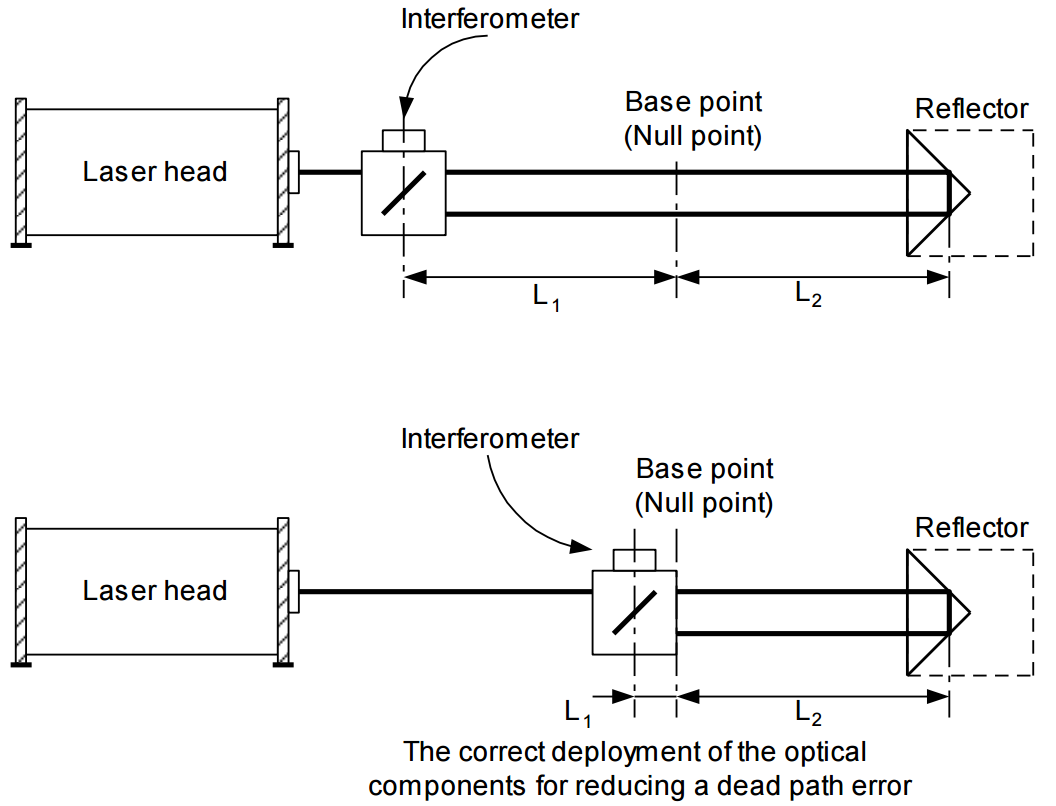
خطأ المسار الميت هو خطأ مرتبط بالتغير في المعلمات البيئية أثناء القياس. يحدث هذا الخطأ عندما لا يتم تضمين جزء من مسار الضوء (مسار ميت) في درجة الحرارة (كل من الهواء والقاعدة) ، وتعويضات الضغط والرطوبة. المسار الميت لمسار الضوء هو المسافة بين مقياس التداخل البصري والقاعدة (أو النقطة الفارغة) لموضع القياس (L1 في الشكل أدناه). دع موضع مقياس التداخل والعاكس الرجعي لا يتغير. عندما يكون هناك تغيير في درجة حرارة الهواء أو الضغط أو الرطوبة ، فإن الطول الموجي يتغير على طول المسار بالكامل (L1 + L2). يتغير طول المسار أيضًا عندما تتغير درجة حرارة القاعدة. لكن نظام التصحيح سيستخدم الطول الموجي الصحيح فقط على الطول L2 وسوف يصحح هذا الطول فقط. لن يتم التصحيح على المسار الميت L1. بهذه الطريقة ، سيقوم نظام الليزر “بتحريك” نقطة الأساس. يكون خطأ المسار الميت أكثر شدة كلما زادت المسافة بين مقياس التداخل ونقطة القاعدة. هذا الخطأ مهم بشكل خاص في مقاييس التداخل بالليزر حيث يتراكم مقياس التداخل في غلاف شائع برأس ليزر ، لأنه من الصعب جدًا عندئذٍ تقليل المسار الميت.
إذا لم يكن شعاع الليزر موازيًا لمحور مُقاس للآلة (أي لم يتم ضبط المسار البصري بشكل صحيح) ، فسيحدث فرق بين المسافة الحقيقية والمسافة المقاسة. يُعرف خطأ المحاذاة هذا باسم خطأ جيب التمام ، لأن حجمه يعتمد على الزاوية بين شعاع الليزر ومحور الجهاز (الشكل أدناه).
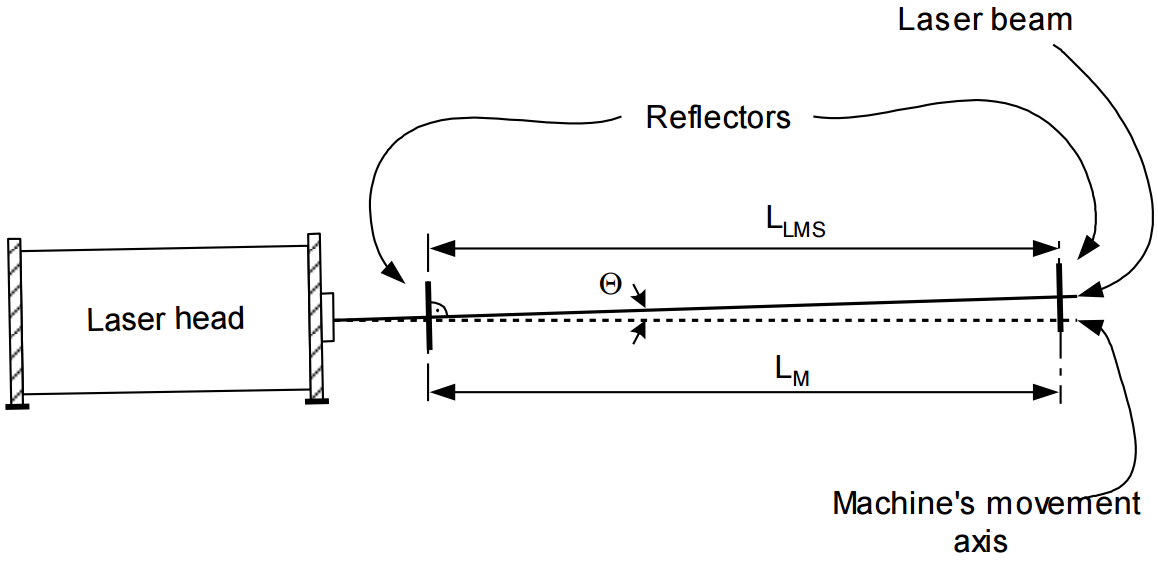
إذا تم استخدام مرآة مسطحة كعاكس ، يجب أن تكون الحزمة متعامدة معها. إذا غيرت الآلة موضعها من النقطة A إلى النقطة B ، فإن الشعاع يبقى متعامدًا على المرآة ، لكنه يتحرك على سطحه. ستكون المسافة التي يقاسها مقياس التداخل الليزري ![]() أصغر من المسافة الحقيقية
أصغر من المسافة الحقيقية ![]() ، وفقًا لـ
، وفقًا لـ
![]()
المعادلة أعلاه صالحة أيضًا عند استخدام مكعب الذرة كعاكس. الطريقة الوحيدة للتخلص من خطأ جيب التمام هي محاذاة شعاع الليزر المناسبة قبل القياس.
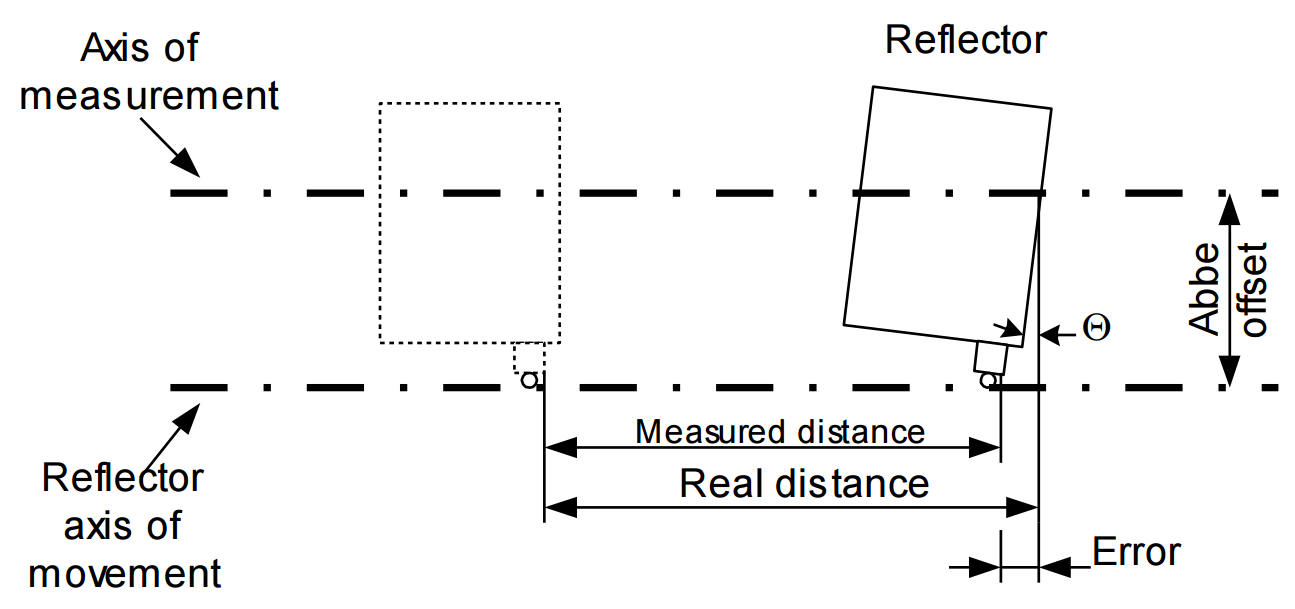
يحدث خطأ آبي عندما لا يتحرك الجزء المقاس بشكل مستقيم تمامًا أثناء القياسات وتظهر حركات زاوية ، مما يتسبب في انحدار العاكس الرجعي. كلما زاد انحدار العاكس كلما زادت المسافة بين محور القياس ومحور الحركة. هذه المسافة تسمى إزاحة آبي. فقط الحركات في محور القياس مهمة (انظر الشكل 17.6). يمكن تجنب خطأ آبي فقط في حالة عدم وجود حركات زاوية للعاكس الرجعي في محور القياسات.
كما ذكرنا سابقًا ، في قياسات الليزر ، يتغير عدم استقرار الطول الموجي بالليزر مباشرةً في القراءة من مقياس التداخل ، على سبيل المثال يتسبب عدم استقرار نسبي لليزر في نطاق 1 ppm في حدوث خطأ قدره 1 ميكرومتر في كل متر واحد من المسافة المقاسة. لذلك فإن خطأ عدم استقرار الليزر مهم بشكل أساسي في القياسات في الفراغ (حيث يكون معامل الانكسار ثابتًا) وعند استخدام ليزر منخفض الثبات (مثل ليزر أشباه الموصلات). الثبات المستخدم عادة في أنظمة القياس بالليزر ، ليزر غاز HeNe هو 0.02 ppm ، لذلك قد يتم إهمال خطأ الاستقرار.
في بعض الحالات ، قد يحدث خطأ ملحوظ بسبب الجزء الإلكتروني من مقياس التداخل. نظرًا لاستخدام الإلكترونيات بشكل أساسي في العد ، فقد ترتبط الأخطاء إما بالحساب الخاطئ (لا يتم احتساب بعض النبضات) أو بالحساب الخاطئ (يتم إجراء الحسابات بدقة محدودة).
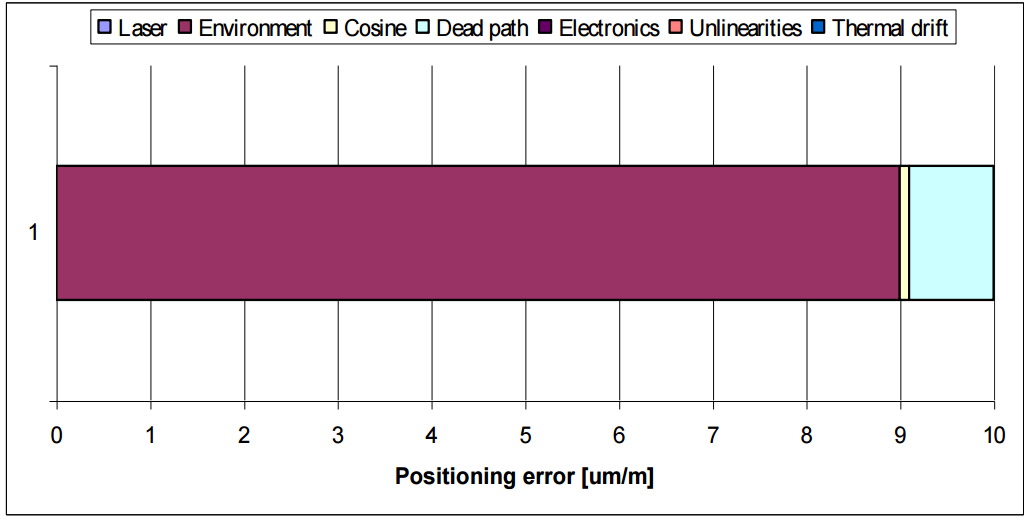
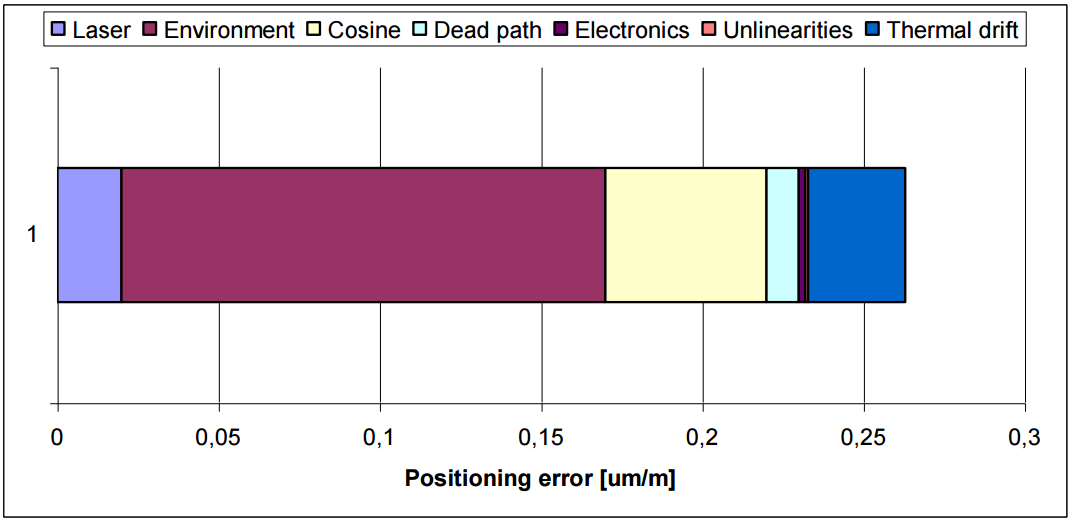
من أجل إظهار أي من الأخطاء يؤثر على دقة نظام القياس بالليزر أكثر من غيره ، نعرض أدناه حسابًا مثاليًا للأخطاء على آلة فولاذية يبلغ طولها مترًا واحدًا. يجب مراعاة المقاييس المختلفة للرسوم البيانية.